

Workshop Format
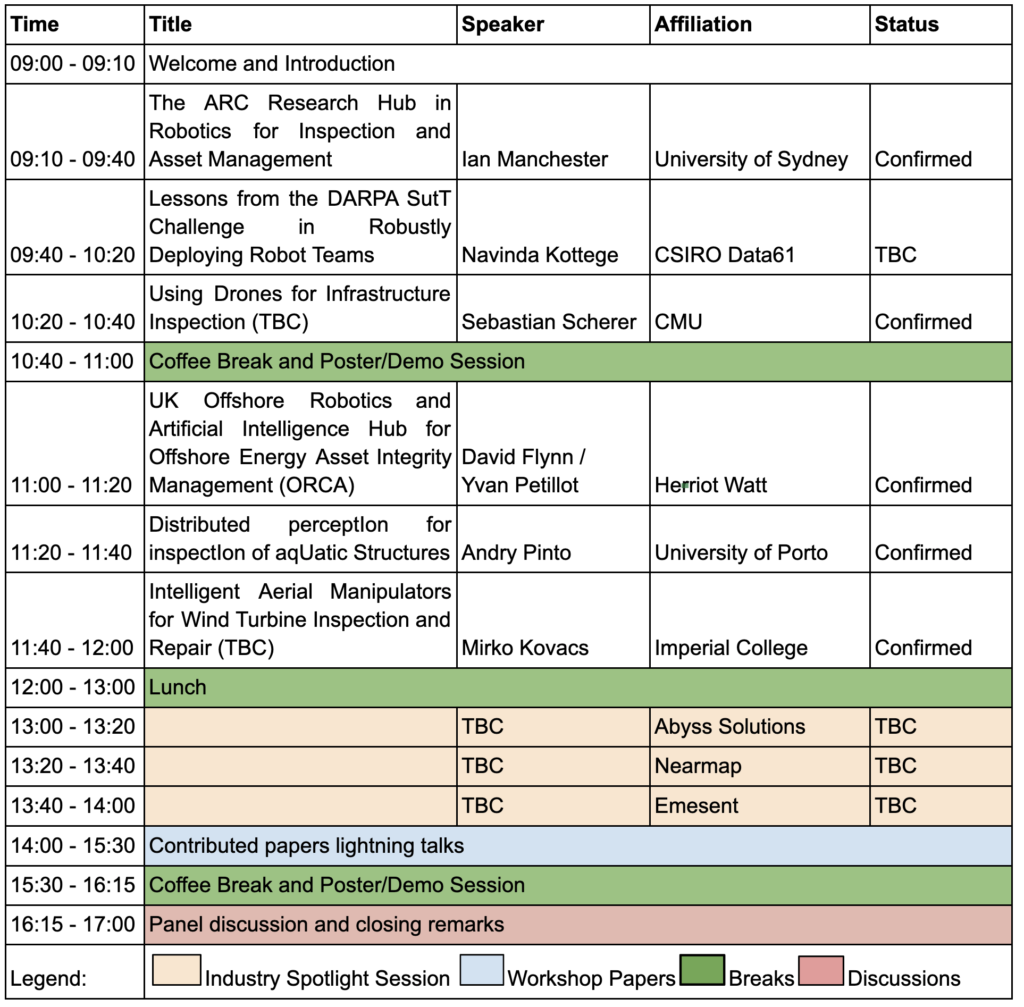
The workshop will consist of four sessions separated by coffee and lunch breaks (see tentative program below). The first two sessions will feature presentations from top speakers in the field, the third session will spotlight representatives from industry and authors of accepted workshop papers, respectively. A fourth session will promote a panel discussion to explicitly encourage exchange of ideas among the participants, both young and senior. As shown in the tentative program, speakers will share their expertise in different robotic systems and applications: underwater, subterranean, flying robotics, etc.
Dates
TBD
Registration
TBD
Overview
The concept of a digital twin as a tool for asset lifecycle management is rapidly gaining momentum, due in large part to the transformative potential of real-time data for fault prediction and predictive maintenance. To date, however, most applications have been at the scale of a single machine in a factory, or a single vehicle. For the applications we consider – i.e. when assets are large and geographically distributed, are confined and difficult to access, or present extreme environmental challenges – the collection of data is the major bottleneck. Robotics technology is already demonstrating its immense potential to conduct inspections and maintenance of vast infrastructure assets. This workshop will explore the state of the art in robotics for asset management.
The workshop will cover the following themes:
- Planning & Control
- Sensing & Perception
- Mapping & Insights
Akin to “sense-plan-act” in traditional robotics, these three research areas form the essential loop for robotic asset management. The main goal of this workshop is to break the research silos formed by the three themes and explore recent advances in robotic systems for asset inspection and management. How can the sensor model be considered during mission planning? Can active sensing be incorporated into control? What abstractions are needed from the perception system to build a digital twin with semantic information? How should a digital twin be represented to decide about interventions and plan future missions? This workshop will seek to establish a common ground between these fields and nurture collaboration and further research in this area through a combination of invited and contributed talks from academic and industry leaders in the field.
We are happy to announce the following invited speakers:
- Ian Manchester – University of Sydey
- Navinda Kottege (TBC) – CSIRO Data61
- Sebastian Scherer – Carnegie Mellon University
- David Flynn – University of Glasgow
- Andy Pinto – University of Porto
- Mirko Kovacs – Imperial College
Workshop organizers:
- Viorela Ila, The University of Sydney, Australian Robotic Inspection and Asset Management Hub (ARIAM), Rose St Building (J04) NSW 2008, Australia.
- Ian Manchester, The University of Sydney, Australian Robotic Inspection and Asset Management Hub (ARIAM), Rose St Building (J04) NSW 2008, Australia.
- Stefan Williams, The University of Sydney, Australian Robotic Inspection and Asset Management Hub (ARIAM), Rose St Building (J04) NSW 2008, Australia.
- Niko Suenderhauf, Queensland University of Technology, Australian Robotic Inspection and Asset Management Hub (ARIAM), 2 George St Brisbane, QLD 4000
- Yvan Petillot, Oceans Systems Laboratory, Heriot Watt University, Edinburgh, United Kingdom
- David Flynn, UK Offshore Robotics and Artificial Intelligence Hub for Offshore Energy Asset Integrity Management (ORCA), University of Glasgow, Glasgow, United Kingdom
Sponsors:
TBD
Workshop Contact:
Please direct all your queries to: