
Vision & Mission
Intelligent Transportation Systems Projects
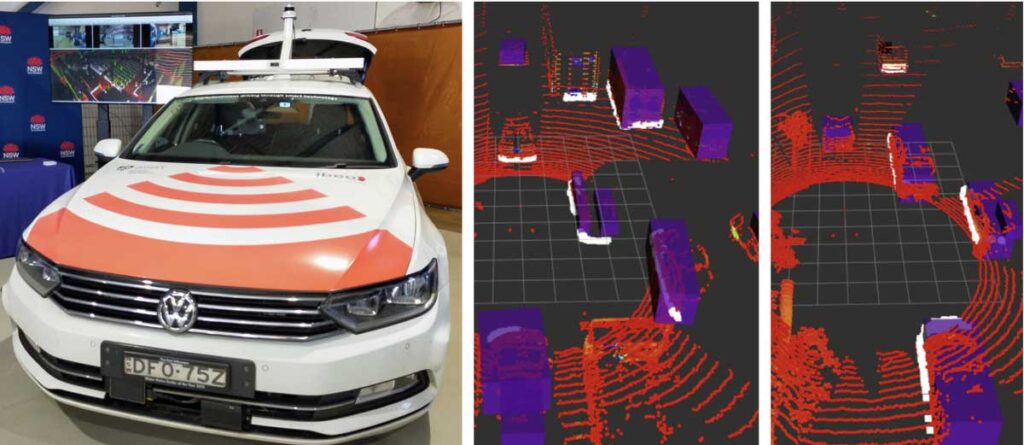
Data Analytics for Autonomous Vehicle Testing (iMOVE – TfNSW)
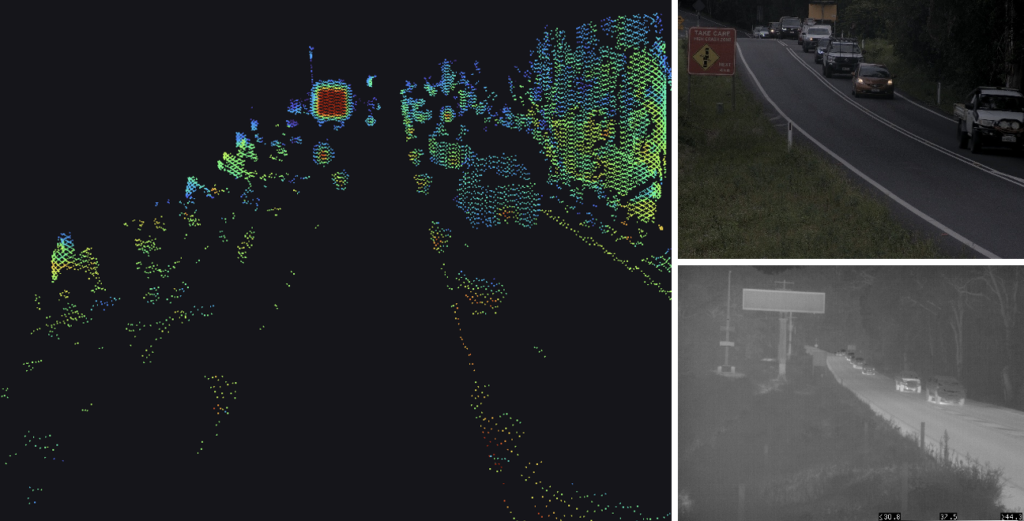
Large Animal Activated Roadside Monitoring System (LAARMA – iMOVE – TMR)
Cooperative Intelligent Transport Systems (C-ITS) on NSW Roads
TfNSW Australian Driving Dataset

ADAS Quality Assessment
Collaborators
- International Partners:
- Renault (France)
- Cornell University (USA)
- École Centrale de Nantes (France)
- Australian Partners:
- Transport for New South Wales (TfNSW)
- Insurance Australia Group (IAG)
- Department of Transport and Main Roads (TMR)
- National Transport Research Organisation (NTRO)
- Cohda Wireless
We would like to acknowledge the support of HxGN SmartNet for providing RTK GPS corrections. This contribution has been valuable in providing ground truth positioning for our research.

Fundamental Research
Our research covers several key areas within intelligent transportation systems:
- V2X Communication: Developing systems that allow vehicles to communicate with each other and with infrastructure, improving connectivity and road safety.
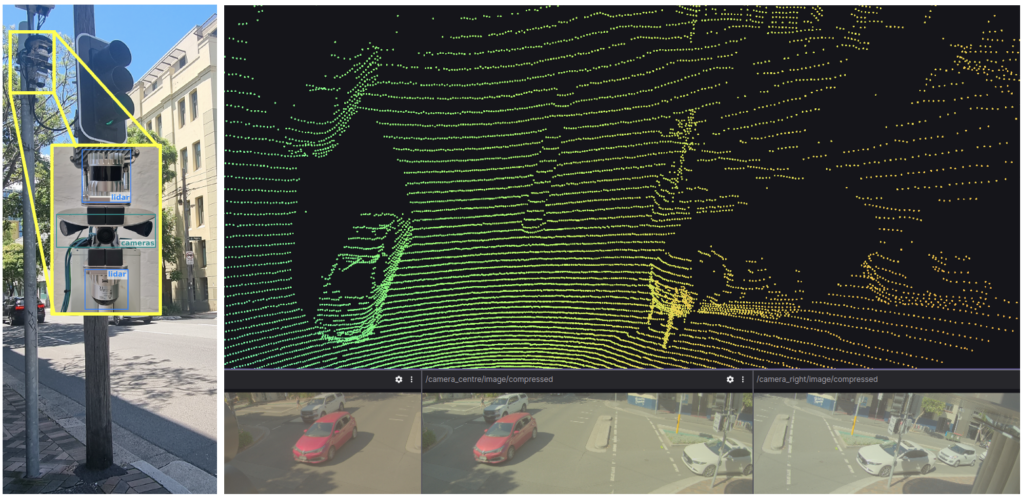
- Cooperative Perception: Enhancing how vehicles and infrastructure perceive their environment using LiDAR and camera systems for more accurate detection and decision-making.
- Scene Understanding & Localisation: Improving vehicle localisation and mapping to ensure accurate positioning and safer autonomous driving.
- Data Analytics: Using machine learning to analyse large datasets and generate insights that improve the performance of autonomous vehicles and traffic systems.
Hardware
We use advanced technology to support our research projects:
- Intelligent Roadside Units (RSUs): Devices that monitor and communicate real-time traffic data, improving the management of road networks.
- Advanced Sensor Systems: Vehicles equipped with LiDAR, cameras, GPS, and Inertial Measurement Units (IMUs) for high-quality data collection.
- ADAS Testing Platforms: Vehicles with built-in sensors that collect data on driver behavior and interaction with advanced driver assistance systems.
Datasets
We maintain several valuable datasets for use in transportation research and development:
- Autonomous Vehicle Driving Data: Data collected from vehicles equipped with advanced sensors, including detailed labels for refining vehicle models.
- Large Animal Detection Dataset: Data from roadside monitoring systems designed to detect animals and improve road safety.
- Cooperative Vehicle and Infrastructure Data: Real-world data from connected vehicles and infrastructure on NSW roads to support cooperative transport systems.
- TfNSW Australian Driving Dataset: A dataset for 3D object detection in autonomous vehicles, collected using synchronised sensor platforms.