When: Tues 10th of Nov, 1p
Where: This seminar will be presented online, RSVP here.
Speaker: Philip Gun
Supervisors: Andrew Hill, Robin Vujanic
Title: Multi-vehicle trajectory planning on road networks
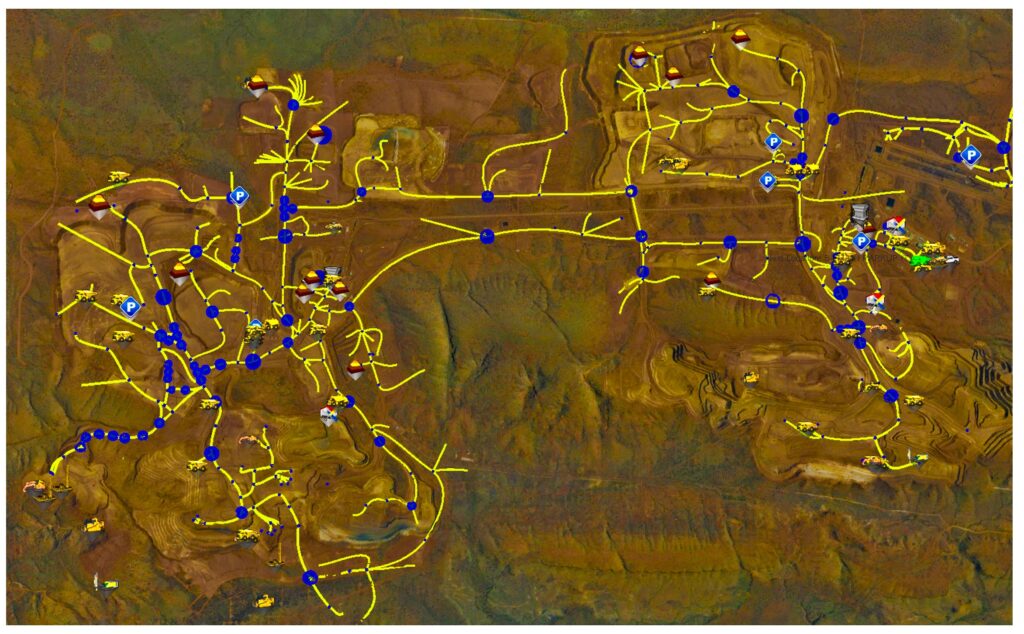
Abstract: When multiple autonomous vehicles work in a shared space, such as in a surface mine or warehouse, they often travel along specified paths through a static road network. Although these vehicles’ actions and performance are coupled, their motion is often planned myopically or omits cooperation beyond avoiding collisions reactively. More desirable solutions could be achieved by coordinating and planning actions ahead of time.
To make multi-vehicle systems more productive and efficient, the thesis introduces planning methods that can optimise for travel time, energy consumption, and trajectory smoothness. Vehicle motion is coordinated by using motion models that combine all trajectories, and avoid collisions. Mathematical programming is then used to find optimised solutions. The proposed methods are shown to significantly reduce solution costs compared to an approach based on common driving practices.
As the number of vehicles and interactions between them increases, the number of solutions grows exponentially, making finding a solution computationally challenging. A major aim here was to find high quality solutions within practical computation times. To achieve this, techniques were developed that exploit the structure of the problems. This includes a heuristic algorithm that scales better with problem size, and is combined with the mathematical programming techniques to reduce their complexity. These were found to significantly reduce computation times, trading off marginal solution quality.
Bio: Philip Gun is a research associate at the Rio Tinto Centre for Mine Automation. He completed a combined degree in Mechatronic Engineering and Commerce in 2011 from the University of Sydney, and submitted his PhD thesis in September 2020.