When: Thursday 25th of May, 1pm AEST
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom. RSVP
Speaker: Dr Tim Bailey
Title: Stabilised Junction Trees For Data Fusion with Deterministic Relationships
Abstract:
Strap in for a flying by the seat of your pants presentation that I have yet to cobble together. Fresh from the robust rejection of my journal article by all three reviewers. Not because it isn’t correct or novel … but because they didn’t like how I wrote it. In this talk I hopefully do better.
I have devised a stabilised junction tree algorithm. This solves an uncommon but important problem in data fusion, where the state-vector contains a subset of values that are so tightly coupled that their relationship is almost deterministic. This is not an issue for moment-form estimation — Kalman filters/smoothers etc — but such methods do not scale to very large state-vectors. Most large-scale estimation — e.g., bundle adjustment — use a sparse information-form representation. This form cannot handle deterministic relationships.
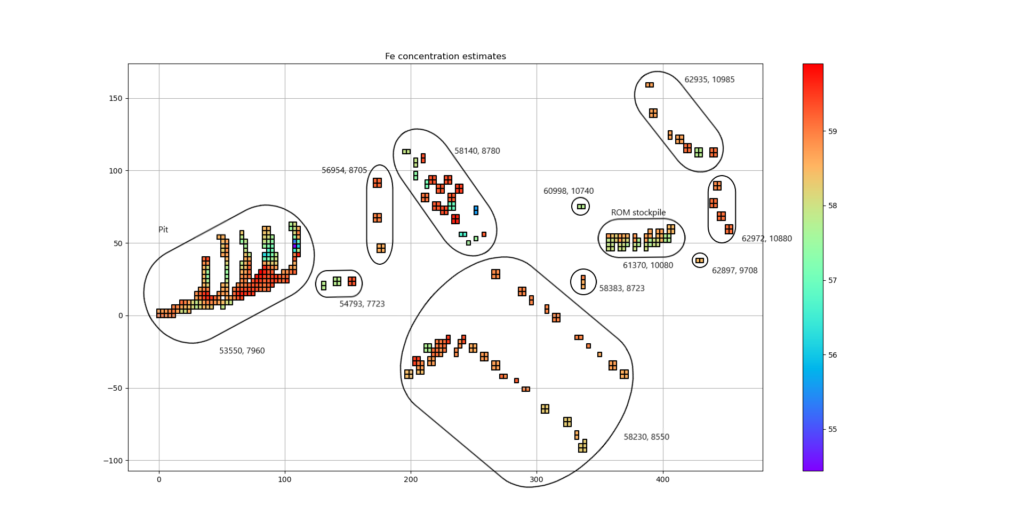
A junction tree has the sparseness properties of the information-form, but permits moment-form representations internally. However, existing moment-form implementations are complicated. Mine is simple and solves the numerical issue. To motivate this solution, I shall discuss a mining problem where we want to keep track of ore-grade as it is moved about a mine site — from pit to stockpiles to processing plant. My model involves a vast voxel grid, recording values in both time and space, that captures ore-grade and its uncertainty and dependency to everywhere else. One new measurement may change the estimate of voxels everywhere, past and present. This problem has the scale and numerical difficulties that the stabilised junction tree solves.
My rejected article is https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4176478
Bio:
Tim Bailey is a research fellow with the RTCMA. He has been at the ACFR since its inception, with a six year hiatus at CSIRO, before returning in 2020.