When: Tuesday 12th of Dec, 11am AEDT
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom. RSVP
Candidate: Damian Abood
Title: Motion Planning for Underactuated Systems through Path Parameterisation
Abstract:
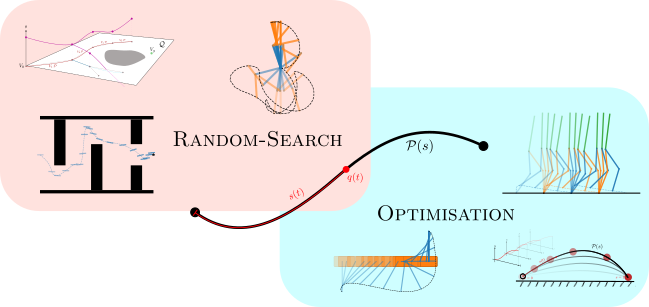
Underactuated systems are becoming an essential field of study within robotics given the rapid advancement and prevalence of legged and flying systems within the modern world. Planning motions that are dynamically feasible for these systems is integral to achieving natural and dynamic movement, however, a great difficulty posed by underactuation is that the space of feasible motions for these systems is strongly constrained by their dynamics. This thesis and presentation investigate the viability of extending path-parameterised motion planning to underactuated systems, where algorithms are proposed in two key areas, sample-based and optimisation-based planning. A focus is placed on systems with a single degree of underactuation, where the scalar dynamics revealed under a path parameterisation can be used for efficient kinodynamic querying and dynamic feasibility verification of generated paths. The proposed algorithms provide the ability to generate dynamic behaviours for a number of underactuated systems of this class. This work demonstrates the advantages of these algorithms in relation to existing approaches, highlighting the successes attributed to the exploitation of this class of underactuated systems under a path parameterisation.
Bio:
Damian received his BE in Mechatronic Engineering from Sydney University in 2018. Since 2019, he has been a PhD student at the Australian Centre for Robotics, working towards research in the planning and control of underactuated robotic systems.