When: Thursday 13th of Feb, 1:00pm AEDT
Where: This seminar will be partially presented at the ACFR seminar area, J04 lvl 2 (Rose St Building) and partially online via Zoom. RSVP
Speaker: Yiduo Wang
Title: DynORecon: Dynamic Object Reconstruction for Navigation
Abstract:
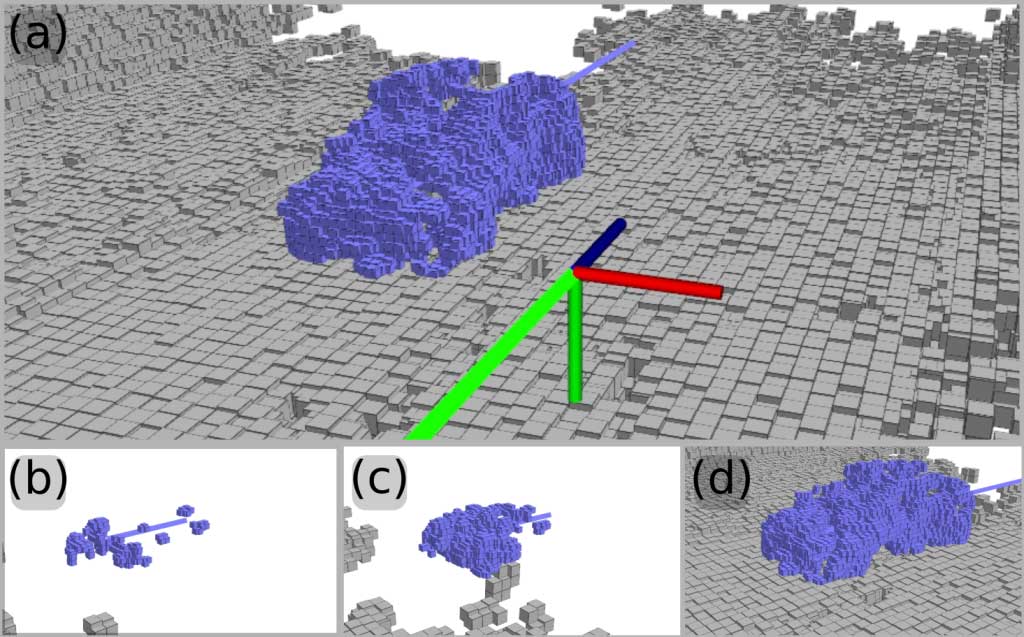
We presents DynORecon, a Dynamic Object Reconstruction system that leverages the information provided by Dynamic SLAM to simultaneously generate a volumetric map of observed moving entities while estimating free space to support navigation. By capitalising on the motion estimations provided by Dynamic SLAM, DynORecon continuously refines the representation of dynamic objects to eliminate residual artefacts from past observations and incrementally reconstructs each object, seamlessly integrating new observations to capture previously unseen structures. Our system is highly efficient (∼20 FPS) and produces accurate (∼10 cm) reconstructions of dynamic objects using simulated and real-world outdoor datasets.
Bio:
Yiduo is a postdoctoral researcher who joined ACFR under Dr. Viorela Ila in 2022 and is currently working with both Dr Viorela Ila and Prof Ian Manchester on multiple projects. He was a DPhil student at the Oxford Robotics Institute (ORI) and a member of the Dynamic Robots Systems Group (DRS) under Assoc. Prof. Maurice Fallon. He holds an MRes Robotics degree awarded by UCL, where he worked with Prof. Simon Julier.