Check out our latest work! ACFR researchers will be presenting the following papers and presentations at the flagship robotics conference IEEE International Conference on Robotics and Automation (ICRA 2025), to be held in 19–23 May, Atlanta, USA
OCRAIM workshop organised by ARIAM members and others:
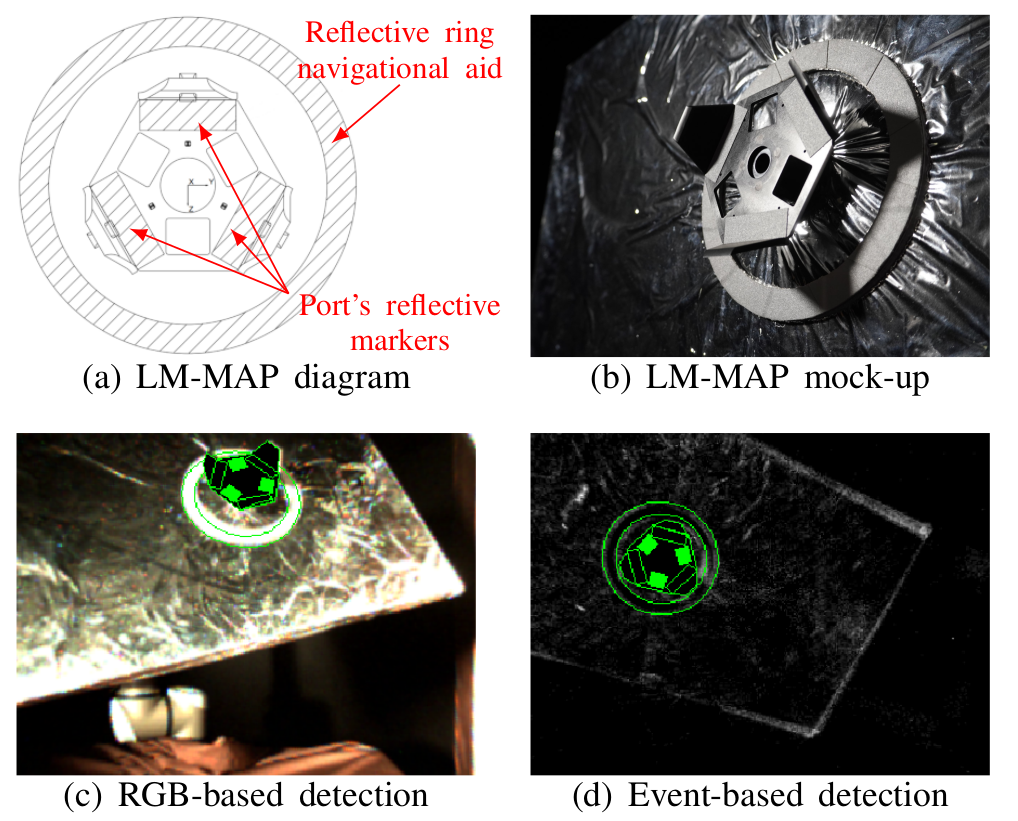
Mixing data-driven and geometric models for satellite docking port state estimation using an RGB or event camera
Paper, collaboration with UTS and industry partner ANT61:
C. L. Gentil, J. Naylor, N. Munasinghe, J. Mehami, B. Dai, M. Asavkin, D. G. Dansereau, and T. Vidal-Calleja
Brief:
This work presents a lightweight, data-efficient vision pipeline for automated satellite docking port detection and state estimation using either standard RGB or event cameras. Event cameras offer superior performance in high dynamic range conditions due to their asynchronous pixel response to light changes, enabling robust detection even under challenging lighting. The system is demonstrated using Lockheed Martin’s LM-MAP and validated with a photometrically accurate test bench replicating orbital dynamics and lighting.
Link:
https://arxiv.org/pdf/2409.15581
Full abstract:
In-orbit automated servicing is a promising path towards lowering the cost of satellite operations and reducing the amount of orbital debris. For this purpose, we present a pipeline for automated satellite docking port detection and state estimation using monocular vision data from standard RGB sensing or an event camera. Rather than taking snapshots of the environment, an event camera has independent pixels that asynchronously respond to light changes, offering advantages such as high dynamic range, low power consumption and latency, etc. This work focuses on satellite-agnostic operations (only a geometric knowledge of the actual port is required) using the recently released Lockheed Martin Mission Augmentation Port (LM-MAP) as the target. By leveraging shallow data-driven techniques to preprocess the incoming data to highlight the LM-MAP’s reflective navigational aids and then using basic geometric models for state estimation, we present a lightweight and data-efficient pipeline that can be used independently with either RGB or event cameras. We demonstrate the soundness of the pipeline and perform a quantitative comparison of the two modalities based on data collected with a photometrically accurate test bench that includes a robotic arm to simulate the target satellite’s uncontrolled motion.
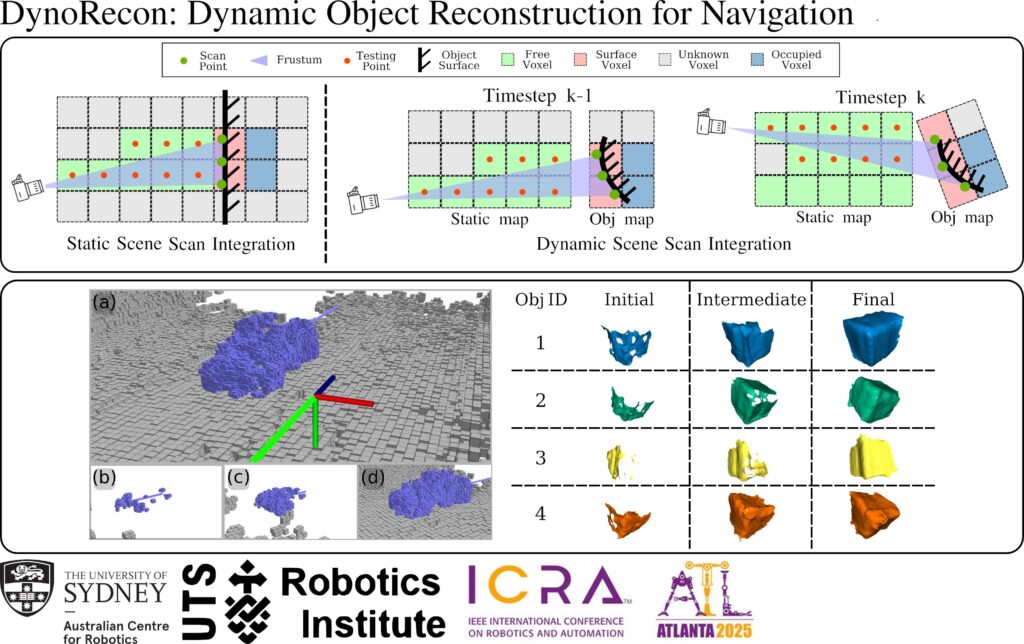
Dynamic Object Reconstruction for Navigation, in Robotics and Automation
Paper collaboration with UTS RI
Wang Y, Morris J, Wu L, Vidal-Calleja T, Ila V.
Abstract:
This paper presents DynORecon, a Dynamic Object Reconstruction system that leverages the information provided by Dynamic SLAM to simultaneously generate a volumetric map of observed moving entities while estimating free space to support navigation. By capitalising on the motion estimations provided by Dynamic SLAM, DynORecon continuously refines the representation of dynamic objects to eliminate residual artefacts from past observations and incrementally reconstructs each object, seamlessly integrating new observations to capture previously unseen structures. Our system is highly efficient (~20 FPS) and produces accurate (~10 cm) reconstructions of dynamic objects using simulated and real-world outdoor datasets.
Event: https://tinyurl.com/yc3npfsr
Project Page: https://acfr-rpg.github.io/DynORecon_webpage/
Paper: https://arxiv.org/abs/2409.19928
Dynamic SLAM
Jesse Morris is presenting his PhD research thus far on Dynamic SLAM as part of the Doctoral Consortium
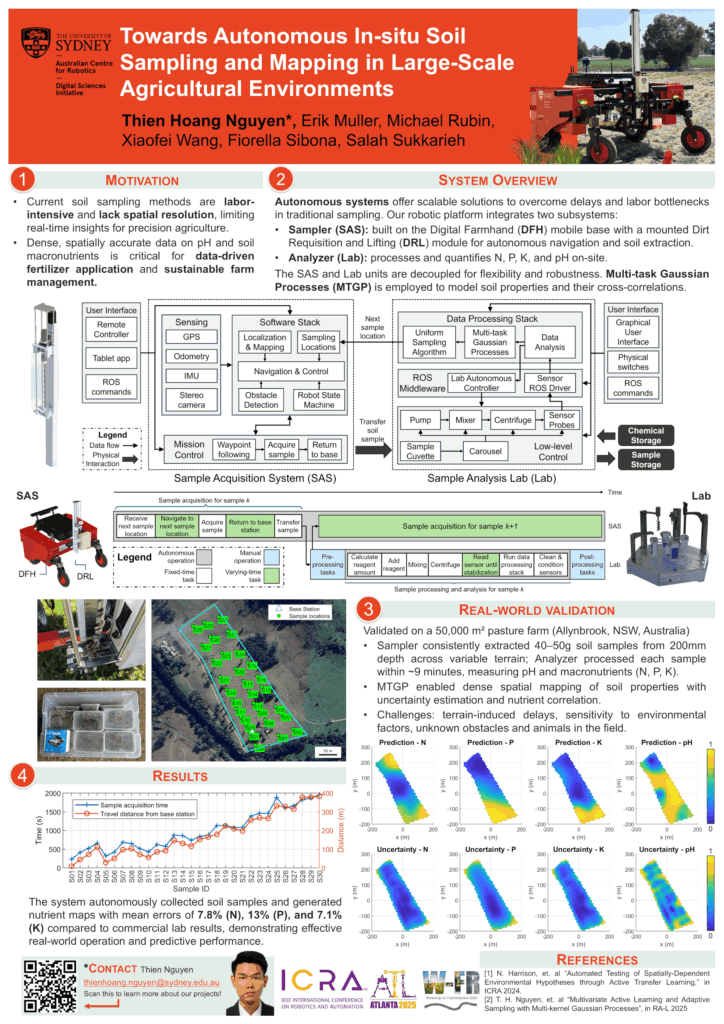
Towards Autonomous In-situ Soil Sampling and Mapping in Large-Scale Agricultural Environments
Paper presented via a spotlight talk and featured in the poster session at WFR.
Authors: Thien Hoang Nguyen, Erik Muller, Michael Rubin, Xiaofei Wang, Fiorella Sibona, Salah Sukkarieh
Brief:
This work presents a modular robotic system for in-field soil sampling and nutrient analysis. The system comprises two integrated subsystems: a field robot equipped with a soil extraction unit, and a mobile soil analysis lab for on-site pH and NPK measurement. Multi-task Gaussian Processes (MTGP) are used to map soil properties with spatial uncertainty and cross-nutrient correlations. Field trials on a large-scale Australian farm validate the approach and demonstrate its potential for scalable, data-driven soil monitoring.
Full abstract:
Traditional soil sampling and analysis methods are labor-intensive, time-consuming, and limited in spatial resolution, making them unsuitable for large-scale precision agriculture. To address these limitations, we present a robotic solution for real-time sampling, analysis, and mapping of key soil properties. Our system consists of two main sub-systems: a Sample Acquisition System (SAS) for precise, automated in-field soil sampling; and a Sample Analysis Lab (Lab) for real-time soil property analysis. The system’s performance was validated through extensive field trials at a large-scale Australian farm. Experimental results show that the SAS can consistently acquire soil samples with a mass of 50g at a depth of 200mm, while the Lab can process each sample within 10 minutes to accurately measure pH and macronutrients. These results demonstrate the potential of the system to provide farmers with timely, data-driven insights for more efficient and sustainable soil management and fertilizer application.
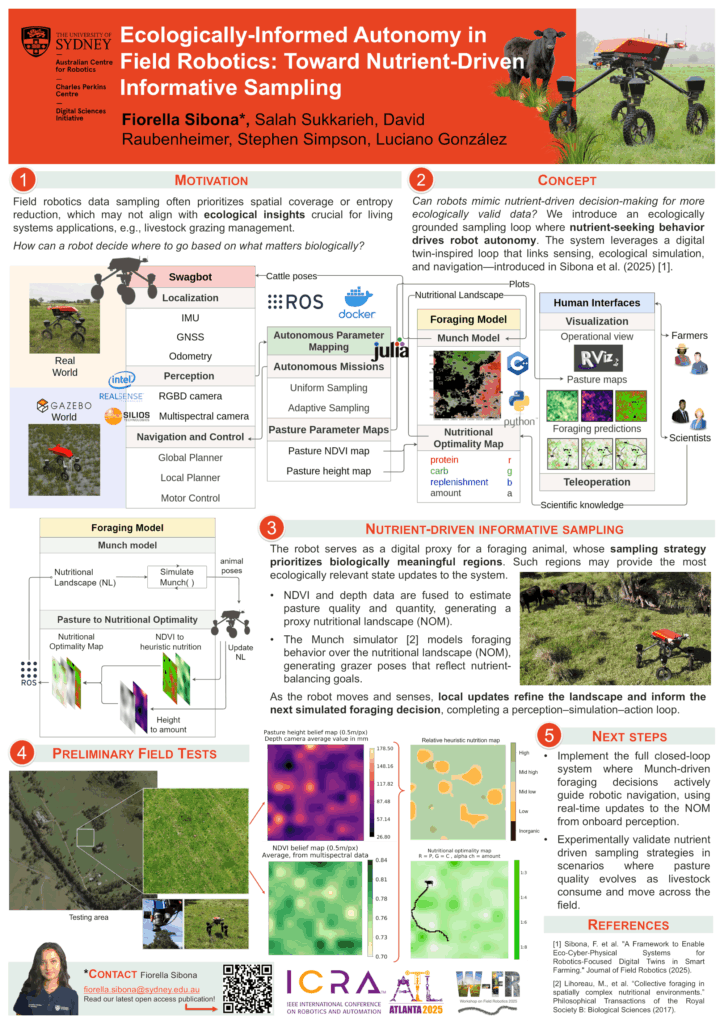
Ecologically-Informed Autonomy in Field Robotics: Toward Nutrient-Driven Informative Sampling
Paper featured in the poster session at WFR, in collaboration with USYD Charles Perkins Centre and USYD School of Life and Environmental Sciences.
Authors: Fiorella Sibona, Salah Sukkarieh, David Raubenheimer, Stephen J. Simpson, Luciano A. González
Brief:
This paper introduces a biologically grounded approach to informative sampling that uses nutrient-balancing goals to guide robot navigation. The concept features a field robot operating as a digital embodiment of a foraging agent simulated in a foraging behaviour model, forming a closed loop between ecological simulation and real-world perception. The robot updates a pasture nutritional quality map using multispectral and height data, which the model uses to predict nutrient-seeking trajectories. This strategy prioritizes biologically meaningful regions over uniform coverage, embedding ecological reasoning into autonomous field robotics.
Full abstract:
This paper explores biologically informed sampling as an emerging direction for field robotics, especially in environments where understanding ecological patterns is more important than covering space evenly. In domains such as precision livestock management or environmental monitoring, biologically meaningful cues, like nutrient distribution or plant health, can guide more purposeful sensing. Inspired by nutritional geometry—a framework describing how animals balance nutrient intake—we consider how such principles might inform robotic autonomy. We outline a conceptual architecture in which a mobile robot serves as a digital proxy for a simulated forager, navigating within a closed loop of perception, ecological simulation, and nutrient-based decision-making. Rather than optimizing for spatial coverage or entropy reduction, the system emphasizes ecological function as a basis for sampling.
Workshop: Novel Approaches for Precision Agriculture and Forestry with Autonomous Robots
Workshop Co-Organization (Fiorella Sibona, Salah Sukkarieh)
This ICRA workshop will bring together robotics researchers and industry partners to explore recent advances in autonomous systems for precision agriculture and forestry. The program includes invited speakers, spotlight paper presentations, and a tree diameter estimation challenge. The workshop is supported by the IEEE Agricultural Robotics and Automation Technical Committee, which is also funding the Best Paper Award.