When: 2nd of October, 1:00pm AEST
Where: This seminar will be partially presented at the ACFR seminar area, J04 lvl 2 (Rose St Building) and partially online via Zoom. RSVP
Speaker: Henry Lyu
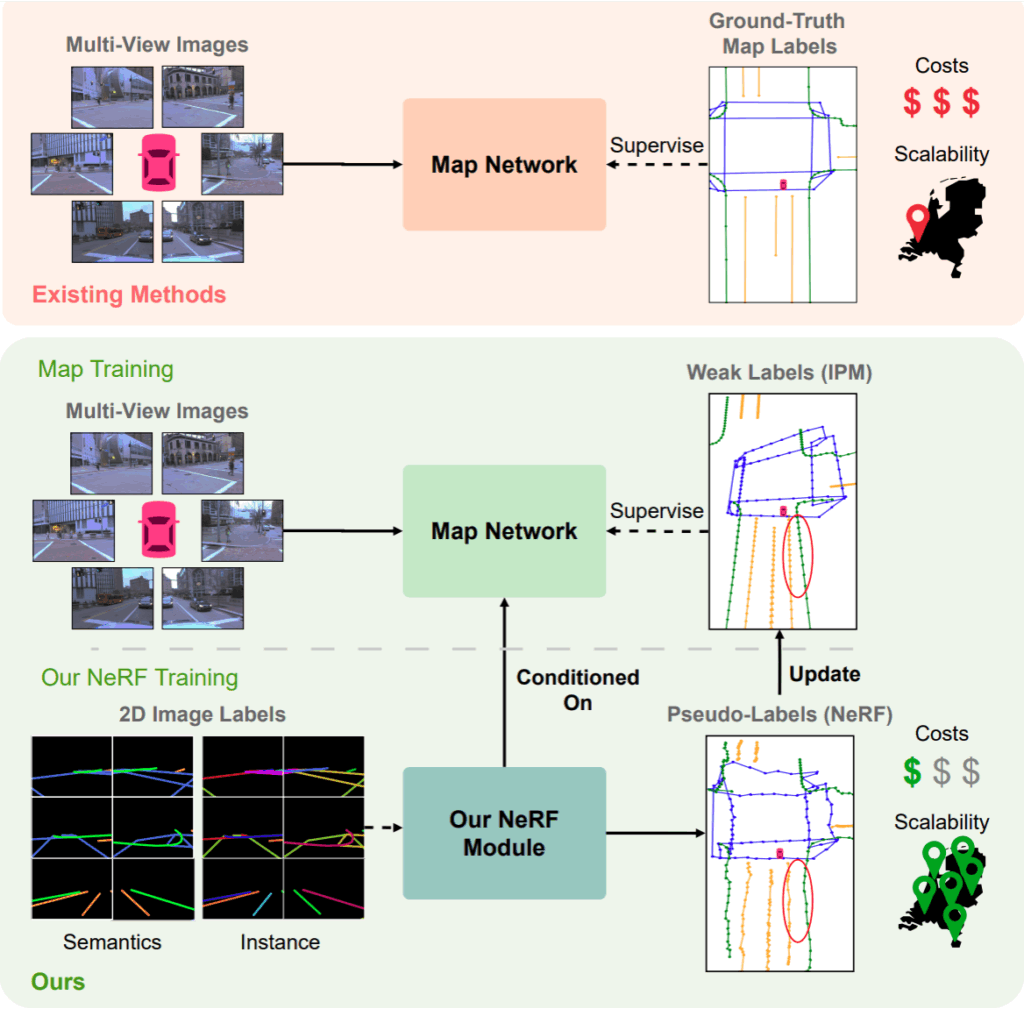
Title: MapRF: Weakly Supervised Online HD Map Construction with NeRF-Based Self-Training
Abstract:
High-Definition (HD) maps are essential for autonomous driving, and online HD map construction offers a promising way to generate local maps from onboard sensors. However, existing methods still rely on extensive map annotations for training, which are expensive to obtain and hinder generalization across diverse driving environments. In this work, we propose MapRF, a weakly supervised framework that leverages accessible 2D image labels to learn an online HD map construction model. To generate reliable pseudo-labels, we introduce a novel Neural Radiance Fields (NeRF) design conditioned on map predictions, enabling self-training and iterative refinement of the model. Furthermore, to mitigate the risk of concept drift during self-training, we propose a Map-to-Ray Matching (MRM) strategy that enforces consistent alignment between map predictions and 2D labels. Extensive experiments demonstrate that MapRF achieves competitive performance while substantially reducing annotation costs.
Bio:
Henry Lyu is currently a PhD student supervised by Stewart Worrall, Mao Shan, and Stephany Berrio Perez at ACFR ITS group. Henry completed Bachelor of Advanced Computing and Bachelor of Commerce from University of Sydney, where he developed foundational skills and interests in intelligent vehicles.
Henry’s research focuses on perception for intelligent vehicles, emphasizing the development of robust algorithms that allows vehicles to perceive and understand the driving environment. He is particularly interested in generating high-precision maps at runtime that capture the static infrastructure of the road. His goal is to enhance the autonomous capabilities of intelligent vehicles, enabling effective navigation and interaction within complex driving environments.