When: 30th of October, 1:00pm AEDT
Where: This seminar will be partially presented at the ACFR seminar area, J04 lvl 2 (Rose St Building) and partially online via Zoom. RSVP
Speaker: Dr. WIlliam Zhi
Title: Robots that See and Act in Unstructured Environments
Abstract:
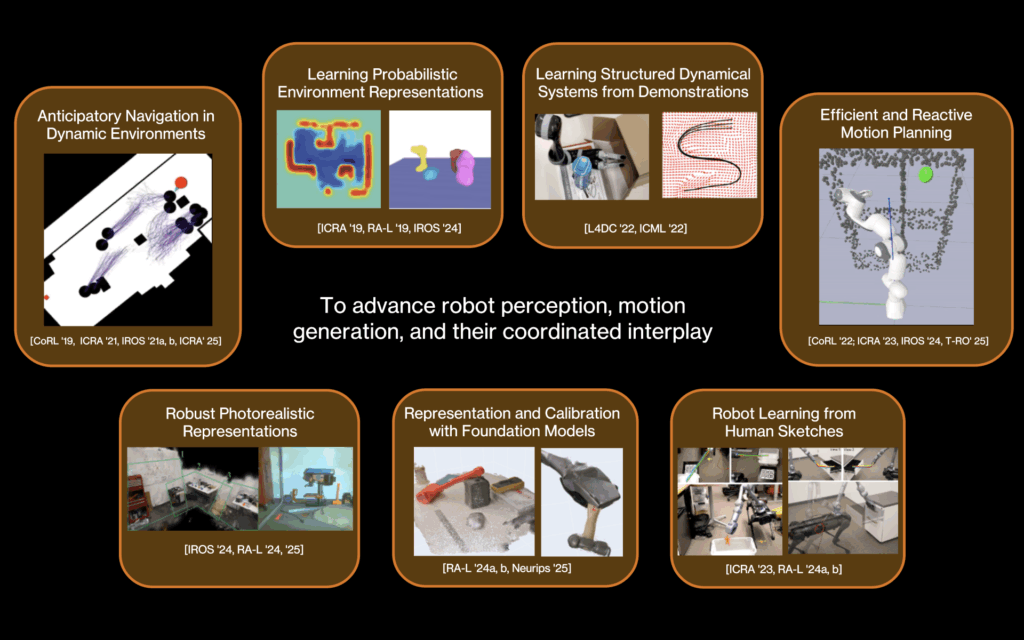
Contemporary robots typically operate within highly structured, carefully engineered environments. We seek to advance a new generation of robots capable of functioning effectively in the diverse and unpredictable real world. This vision demands that robots learn from their experiences, interpret their surroundings, and adapt their behavior accordingly. In this seminar, I will present my work on two core aspects of robotic autonomy: the ability to see (robot perception) and the ability to act (motion generation).
First, I will discuss my research on enabling robots to efficiently learn skills, represented as stable dynamical systems, from a small set of human demonstrations. These skills can be generalised to facilitate motion generation in novel environments. Next, I will introduce my efforts to leverage foundation models within robotics pipelines, enabling robots to accurately perceive and robustly represent their operating environments without requiring meticulous calibration. Finally, I will outline how my research contributes to the evolving robotics landscape and highlight several impactful future directions in my research program.
Bio:
William Zhi is an incoming Lecturer in the School of Computer Science at the University of Sydney. He currently holds a postdoctoral appointment with the College of Connected Computing at Vanderbilt University, and until August 2025, was a Postdoctoral Research Fellow at the Robotics Institute, Carnegie Mellon University. His research develops methodologies and systems that enable robots to perceive complex environments, reason about possible outcomes, and generate safe motions for effective operation in unstructured settings. He was recognised as a Robotics: Science and Systems Pioneer in 2020 and received the Best Paper Award at the Learning for Dynamics and Control conference in 2022. Before his postdoctoral work in the United States, he completed his PhD at the University of Sydney, where his thesis received the School’s Outstanding Thesis Award. During his PhD, he spent time as an intern research scientist at NVIDIA’s Seattle Robotics Lab.