Check out our latest work! ACFR researchers will be presenting the following papers at the upcoming IEEE Conference on Decision and Control (CDC 2021), to be held online Dec 13 – 17:
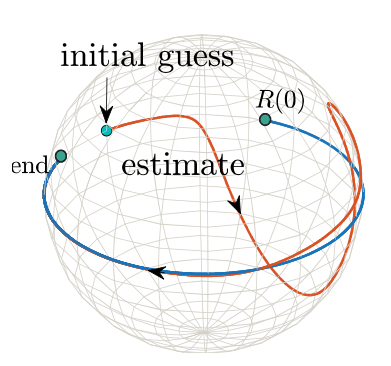
An almost globally convergent observer for visual SLAM without persistent excitation
Bowen Yi, Chi Jin, Lei Wang, Guodong Shi, Ian R. Manchester
Preprint: https://arxiv.org/abs/2104.02966
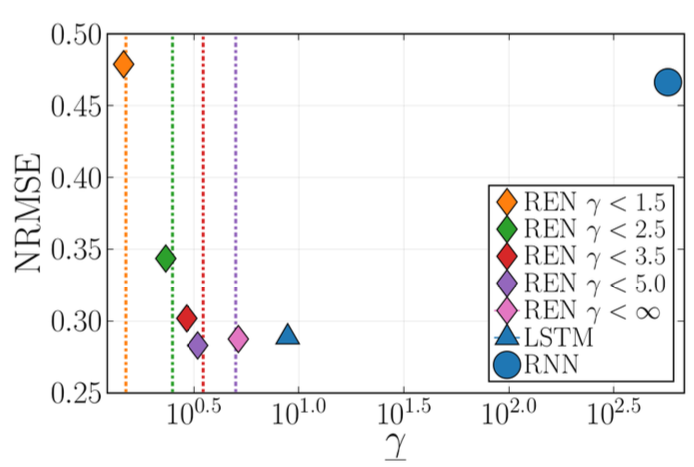
Recurrent Equilibrium Networks: Unconstrained Learning of Stable and Robust Dynamical Models
Max Revay, Ruigang Wang, Ian R. Manchester
Preprint: https://arxiv.org/abs/2104.05942
Code: https://github.com/imanchester/REN
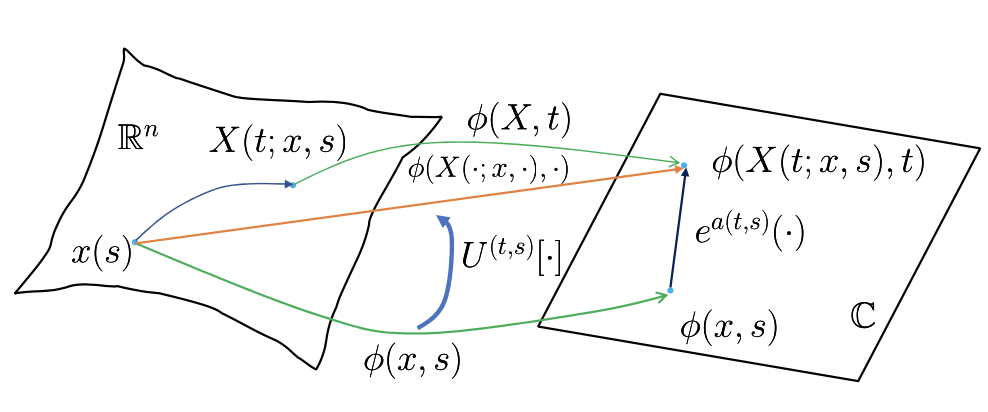
On the Equivalence of Contraction and Koopman Approaches for Nonlinear Stability and Control
Bowen Yi, Ian R. Manchester
Preprint: https://arxiv.org/abs/2103.15033
Contraction-Based Methods for Stable Identification and Robust Machine Learning: a Tutorial
Ian R. Manchester, Max Revay, Ruigang Wang
Preprint: https://arxiv.org/abs/2110.00207
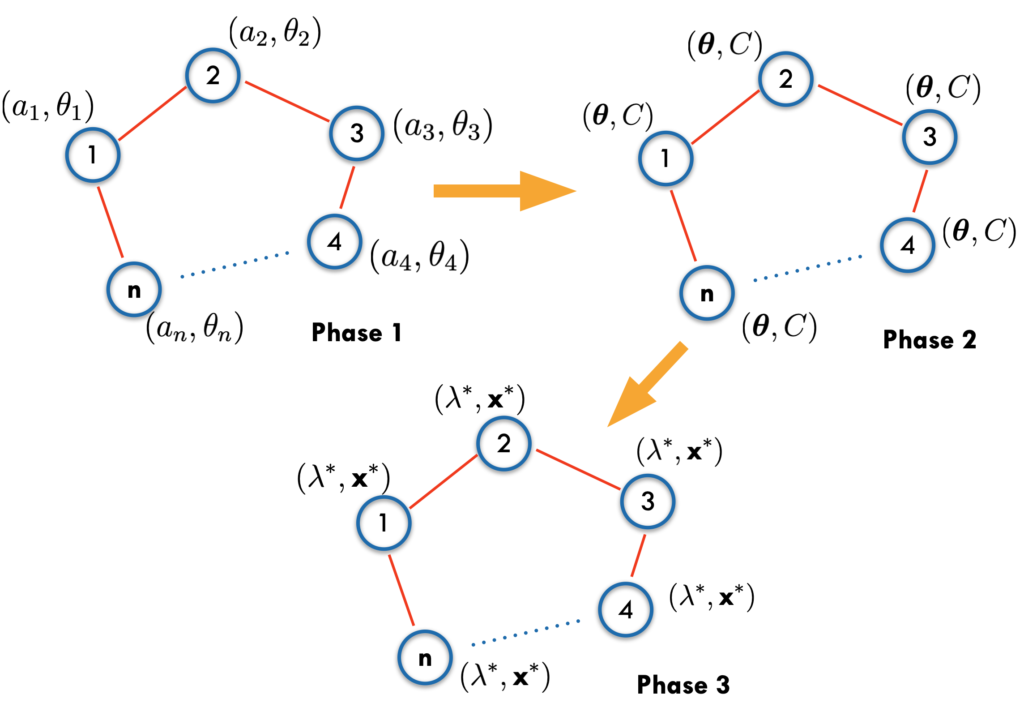
Social Shaping of Competitive Equilibriums for Resilient Multi-Agent Systems
Yijun Chen, Razibul Islam, Elizabeth Ratnam, Ian R. Petersen, Guodong Shi
Preprint: https://arxiv.org/abs/2103.12911
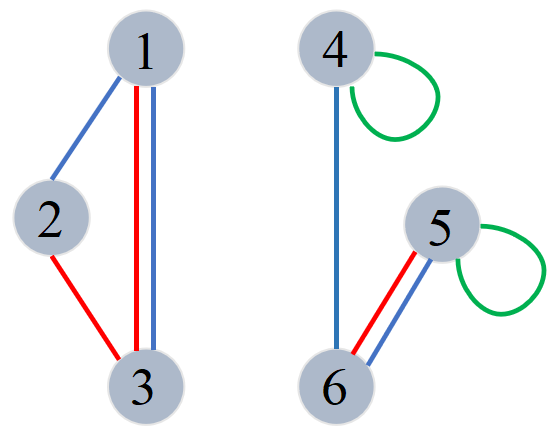
Graphical Characterizations for Structural Controllability of Drifted Bilinear Systems
Xing Wang, Bo Li, Jr-Shin Li, Ian R. Petersen, Guodong Shi
Preprint: https://arxiv.org/abs/2103.12915
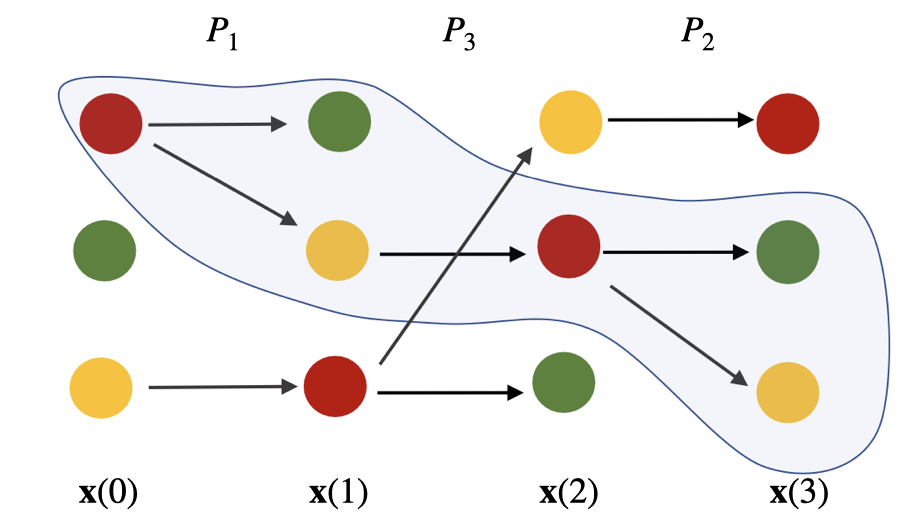
Achieving Consensus in Spite of Stubbornness: Time-Varying Concatenated Friedkin-Johnsen Models
Lingfei Wang, Camela Bernardo, Yiguang Hong, Francesco Vasca, Guodong Shi, Claudio Altafini