Nathan Wallace has successfully completed his PhD thesis, entitled “Energy-aware Planning and Control of Off-road Wheeled Mobile Robots”. The work was supervised by Professor Salah Sukkarieh, Dr Andrew Hill , Dr He Kong and Dr Zhe Xu.
Congratulations Nathan!
Abstract:
In modern agriculture, many of the tasks necessary for the smooth operation of a farm can be categorised as dull, dirty, or dangerous. This makes such operations a prime candidate for automation. However, most agricultural properties are vast, often encompassing large areas of undulating off-road terrain with varying traction conditions, making them difficult to traverse for wheeled platforms. Furthermore, the large scale of these properties necessitates careful consideration and management of resources—especially energy or fuel—in the planning of missions, to traverse these large distances and successfully achieve objectives without the risk of stranding the platform out in the field. These challenges need to be addressed before autonomous wheeled mobile robots are ready for deployment in agricultural contexts.
This thesis seeks to address some of the key issues that impact the feasibility of deploying wheeled mobile robots in the field, focusing on off-road mobility and the generation of energy-efficient plans for these platforms. In the case of agricultural applications, where the robot may be required to operate near crops and livestock, accurate navigation is of utmost importance, and achieving this in the presence of difficult off-road conditions is a major challenge. The solution proposed in this work is an optimisation-based estimation and control strategy for accurate trajectory tracking in the presence of slip. A novel structured parameter blocking extension to this strategy is developed and tested, and shown to improve state estimation and path tracking performance for traversal over rapidly varying terrain conditions.
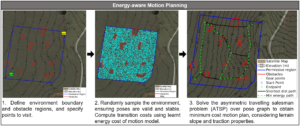
To address the problem of efficiency, a data-driven energy cost of motion model for an omnidirectional wheeled mobile robot is then developed, and asymptotically optimal sampling-based planners exploiting this model, along with consideration of various terrain features and the configuration of the platform itself, are presented.

dam’s edge at the University of Sydney Bringelly farm site using the slip-compensating estimation and control methods developed.