Please click on the titles or thumbnails to access the videos of the talks.
Sensing the World with Event-based Cameras
Davide Migliore – Prophesee
Slides PDF
A Dynamic Object-invariant Space for Dynamic Visual SLAM
Cesar Cadena – ETH Zurich
Beyond SLAM: Actionable Perception of Places, Objects and Humans
Luca Carlone – MIT
Deep Direct Visual SLAM
Daniel Cremers – TU Munich
Slides PDF
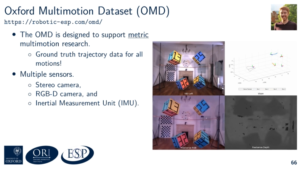
Towards Metric Multimotion Estimation
Jonathan Gammell – Oxford Robotics Institute

Understanding Performance Characteristics of Neuromorphic Event-based Vision Sensors
Kynan Eng – CEO of iniVation AG
Slides PDF
Recognition, tracking and reconstruction of multiple moving objects
Lourdes Agapito – University College London
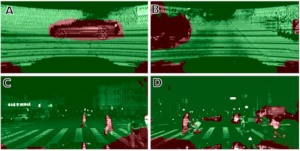
Motion Detection and Tracking in 3D LiDAR Scans
Wolfram Burgard – University of Freiburg
Spatial AI in AR/VR
Matia Pizzoli – Facebook AR/VR
Accepted Papers
Cross-modal Transfer Learning for Segmentation of Non-Stationary Objects Using LiDAR Intensity Data
Tomasz Novak, Krzysztof Ćwian, Piotr Skrzypczyński – Poznan University of Technology, Poland
Paper PDF

Agent-Aware State Estimation: Effective Traffic Light Classification for Autonomous Vehicles
Shane Parr*, Ishan Khatri*, Justin Svegliato, Shlomo Zilberstein – University of Massachusetts Amherst, USA
Paper PDF
* Equal contribution