Check out our latest work! ACFR researchers will be presenting the following papers at the upcoming IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021), to be held Sep 7 – Oct 1:

Fast-Learning Grasping and Pre-Grasping via Clutter Quantization and Q-map Masking
Dafa Ren, Xiaoqiang Ren, Xiaofan Wang, S. Tejaswi Digumarti, and Guodong Shi
Preprint: https://arxiv.org/abs/2107.02452
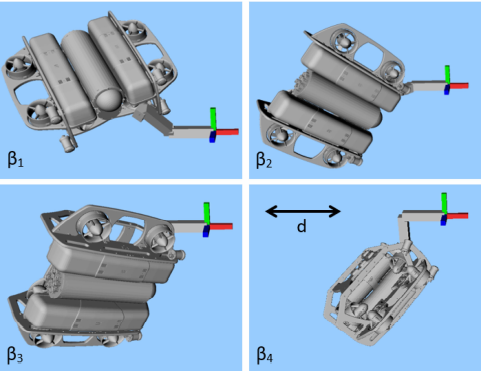
Anisotropic Disturbance Rejection for Kinematically Redundant Systems With Applications on an UVMS
Wilhelm Johan Marais, Stefan Williams, and Oscar Pizarro
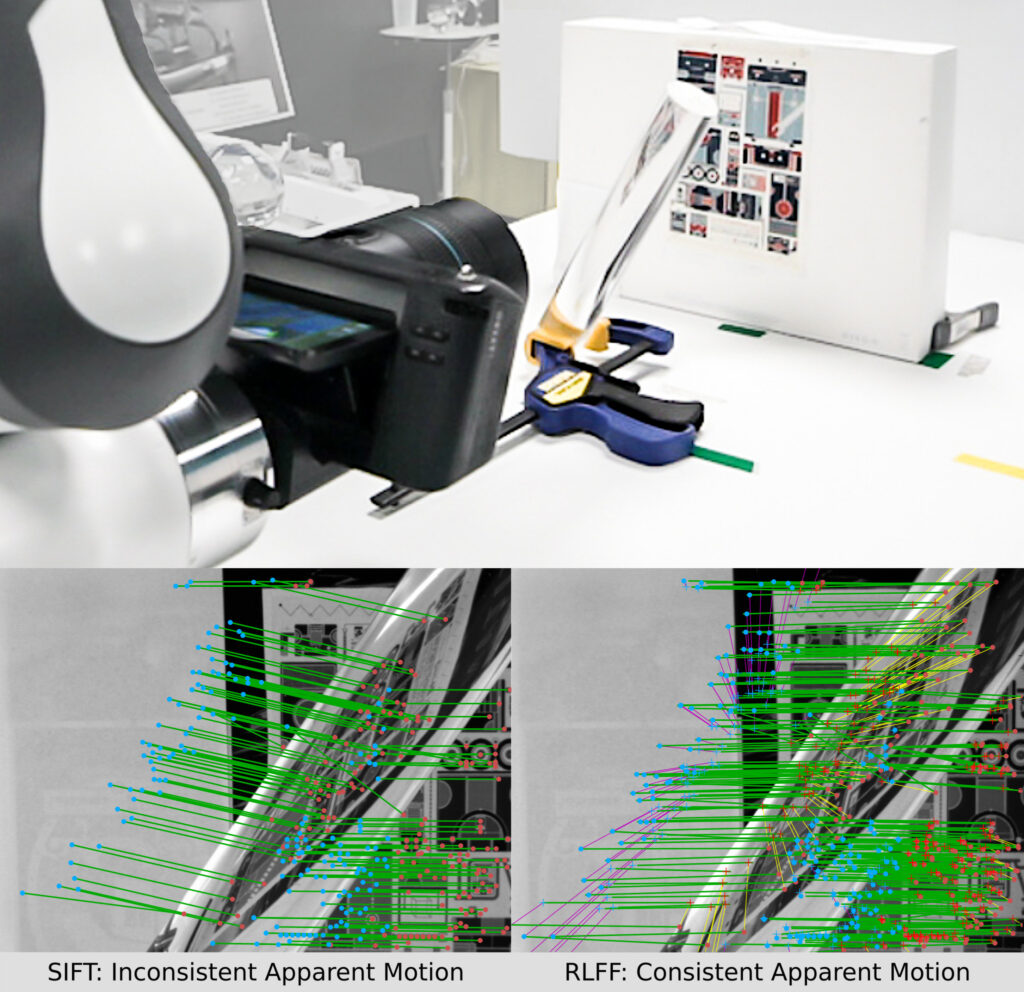
Refractive light-field features for curved transparent objects in structure from motion
Dorian Tsai, Peter Corke, Thierry Peynot, Donald G. Dansereau
Preprint, dataset and code: https://roboticimaging.org/Projects/LFRefract/
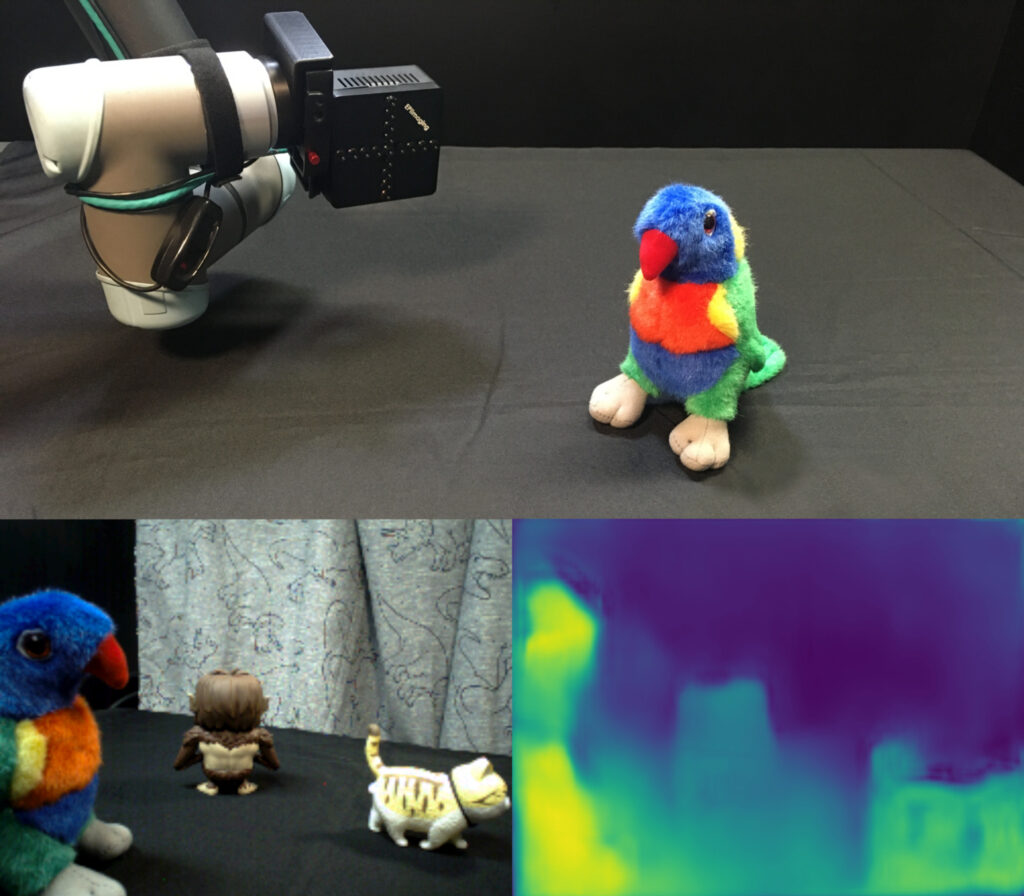
Learning to See with Sparse Light Field Video Cameras
S. Tejaswi Digumarti, Joseph Daniel, Ahalya Ravendran, Ryan Griffiths, and Donald G. Dansereau
Preprint, dataset and code: https://roboticimaging.org/Projects/LearnLFOdo/