When: Thursday 16th of Nov, 6pm AEDT
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom. RSVP
Candidate: Darren Tsai
Title: Overcoming Domain Shift in Lidar-based 3D Object Detection in Urban Contexts
Abstract:
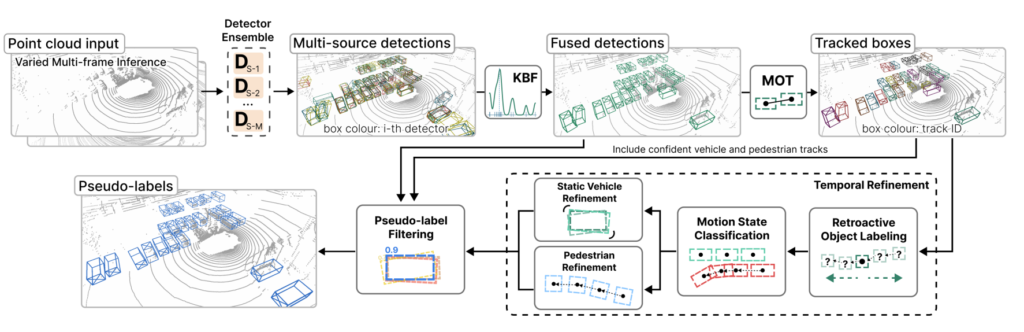
Darren’s thesis addresses the challenge of performance degradation in lidar-based 3D Object Detection when 3D detectors are applied to different lidar types and operational environments. This problem is one of domain shift, which stems from applying a detector trained using data from one domain to a new domain with variation in sensors (e.g. lidar scan patterns), weather conditions, and even different features of the environment such as architecture, types of cars driven and many others. To counter this, Darren proposes two solutions. The first is a domain-invariant representation that combines camera and lidar data to create a lidar-agnostic 3D detection framework, transforming object points into a unified representation and ensuring optimal sensor fusion with a robust calibration technique and a surface completion network. The second approach is an auto-labelling framework, leveraging an ensemble of pre-trained detectors to generate robust labels for various lidar types and refine these labels temporally. The results show significant improvement over the state-of-the-art, and that this approach is suitable for any 3D detector or data augmentation technique without impacting runtime performance
Bio:
Darren Tsai received the B.S. degree in Electrical Engineering with First Class Honours from the University of Sydney, Australia, in 2020. This presentation is the culmination of 3.5 years of research in the study of lidar based 3D object detection in urban scenarios, and is part of the viva voce for his thesis. His research interests include computer vision and deep learning with a focus on unsupervised domain adaptation.