When: Tuesday 25th of July, 4pm AEST
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom. RSVP
Candidate: Jackson Shields
Title: Planning Informative Benthic AUV Surveys
Abstract:
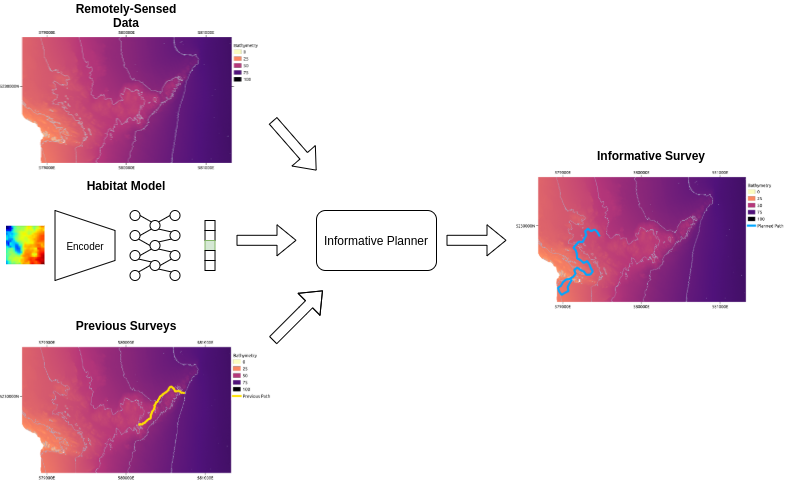
There is an ongoing global effort to explore and characterise marine environments, including the benthos or seafloor habitat, that is driven by research in ecology, geology and archaeology. The seafloor structure can be observed through remotely-sensed data, such as bathymetry (a depth map of the seafloor), which can be collected at large scales. The seafloor structure can provide insights into the potential benthic habitats, though the habitats themselves cannot be directly determined from the bathymetry. To collect in-situ observations, special purpose AUVs are deployed to collect imagery of the seafloor communities. However, due to the small sensor footprint of the imagery, the sampling capacity of AUVs is limited relative to the vast areas that need to be surveyed. The relationship between these sparse in-situ samples and the bathymetry can be learned with a habitat model, allowing the prediction of the distribution of benthic habitats beyond where they can be feasibly sampled. However, for this relationship to be learnt successfully, the sampling locations must be carefully planned to characterise the survey area, creating the need for AUV trajectories that sample sparsely yet effectively. This thesis links informative path planning and active learning to prioritise sampling that will most improve the habitat model. Information objectives are designed that utilise the habitat model and the previous sampling locations to design informative sampling trajectories for the AUV.
Bio:
Jackson Shields is a research engineer and PhD candidate in the marine group at ACFR. His PhD is focused on using remotely-sensed data for habitat modelling and informative path planning for Autonomous Underwater Vehicles (AUVs). As a research engineer he designs, builds and operates AUVs primarily in support of marine science.