When: Thursday 9th of February, 1pm AEDT
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speaker: Suraj Bijjahalli
Title: An Unsupervised object detection algorithm for underwater imagery
Abstract:
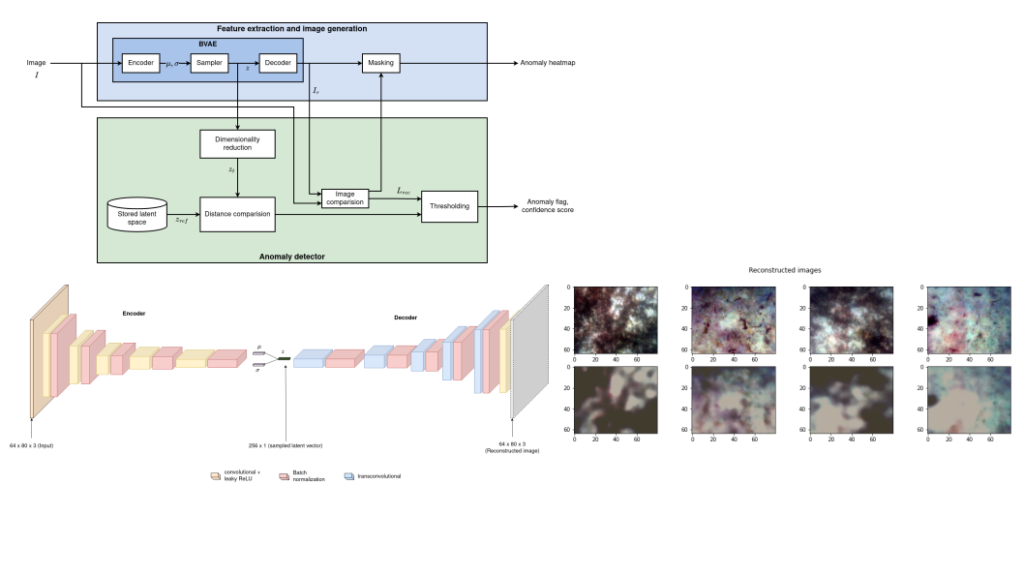
Detection and separation of artificial objects from natural background features in optical imagery is a key requirement for several subsea applications. Traditionally, underwater object detection has typically been characterized by explicit knowledge of the properties of the target object and the availability of ground truth labels. This has allowed the application to be framed as a pattern-recognition problem in which the object is abstracted by several handcrafted geometrical or statistical features, and a detection flag is triggered by the observed presence of these features. This approach is impractical when the properties of the object are completely unknown or have a high level of uncertainty. I will present ongoing work on an unsupervised anomaly detection framework for this problem, in which ground truth labels are unavailable, and datasets are either severely imbalanced, or do not contain instances of the objects of interest i.e. anomalies altogether. Specifically, a Beta-Variational Autoencoder (BVAE) is proposed to learn meaningful representations of seafloor imagery and accurately reconstruct it. In addition to reconstruction error metrics which are commonly used for anomaly detection in generative models, an anomaly metric is proposed based on a mapping from image to latent space, and a latent clustering methodology. Additionally, the influence of two model hyperparameters on detection performance is investigated- the dimensionality of the latent space, and the weighting parameter which enforces independence on the latent space dimensions.
Bio: Suraj Bijjahalli is a postdoctoral researcher at the ACFR. He completed his PhD from RMIT University in 2021 before joining the marine robotics group. His research interests include machine learning applied to underwater imagery and AUV navigation.