When: Thursday 23rd of September, 1pm AEST
Where: This seminar will be presented online via Zoom, RSVP here.
Speaker: Dr Lachlan Toohey
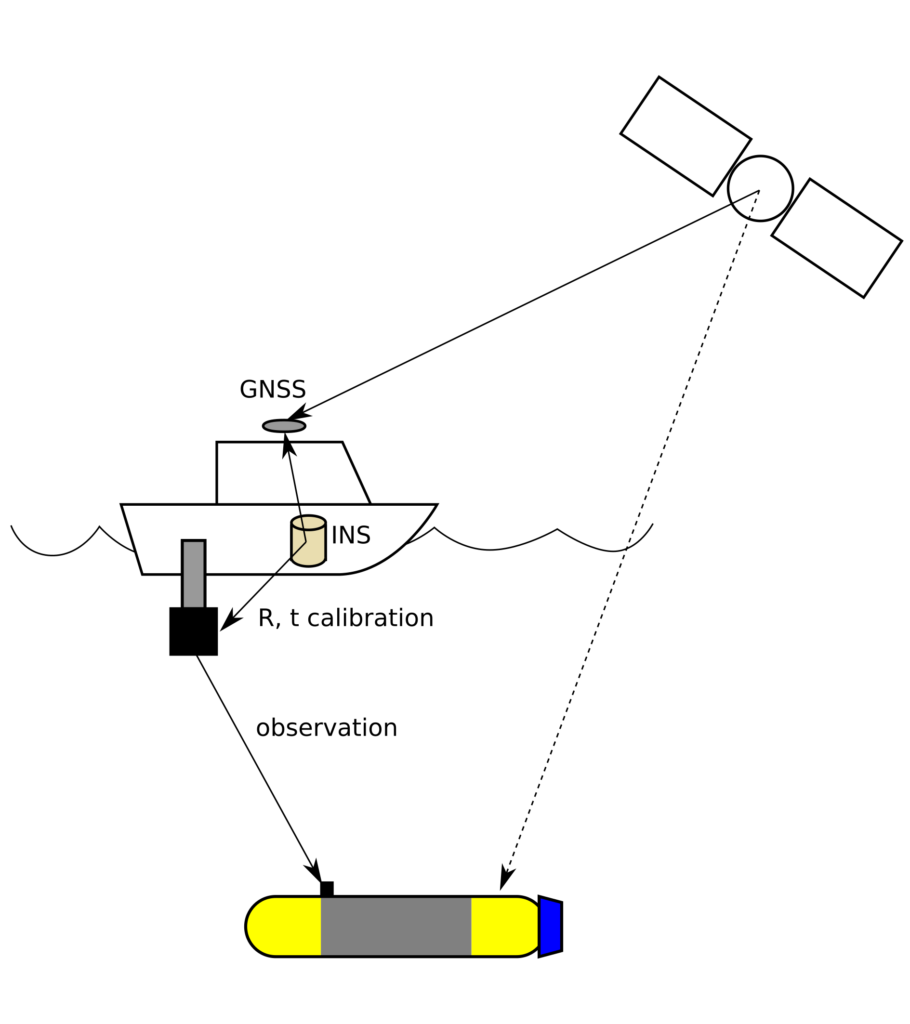
Title: Calibration of USBL transceiver pose with a moving target
Abstract:
Replicating the innate human ability to walk and run in a range of environments has been an area of interest in the robotics community for a few decades. Great progress has been made with bipedal robots able to perform impressive manoeuvres, or traverse a variety of challenging environments. However, combining these capabilities in real-time Autonomous underwater vehicles can perform tasks for multiple hours deep underwater and whilst below the surface they are unable to receive GNSS signals to constrain position estimates. Attenuation of light and turbidity result in limited imaging range – and when tasks don’t go over the same area SLAM is unable to constrain the growth in uncertainty whilst underwater. Ultra-Short Baseline systems can be used to ‘relay’ global position of a ship-based GNSS/INS system through use of round-trip ranging and signal delays between closely spaced hydrophones to get range and direction to a target AUV system. Calibration of the pose offset between the INS system and the USBL transceiver is critical to accurate and consistent position estimates of the remote system. This talk will cover the processes that have been used and issues that arise in nonlinear optimisation of this pose offset with an aim for online calibration with a moving target.
Bio:
Lachlan Toohey is a postdoctoral research associate at the ACFR in the marine robotics group. He completed his PhD in the same group in 2016 investigating cooperative localisation under bandwidth constraints. During his time in the marine robotics group he has led field trips around Australia with the AUVs Nimbus and Sirius, worked on industry projects with Thales Underwater Systems and worked to improve calibration processes for the key navigation sensors required for underwater surveying.