When: Tuesday 18th of October, 1pm AEDT
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speaker: Elena Petri (Université of Lorraine)
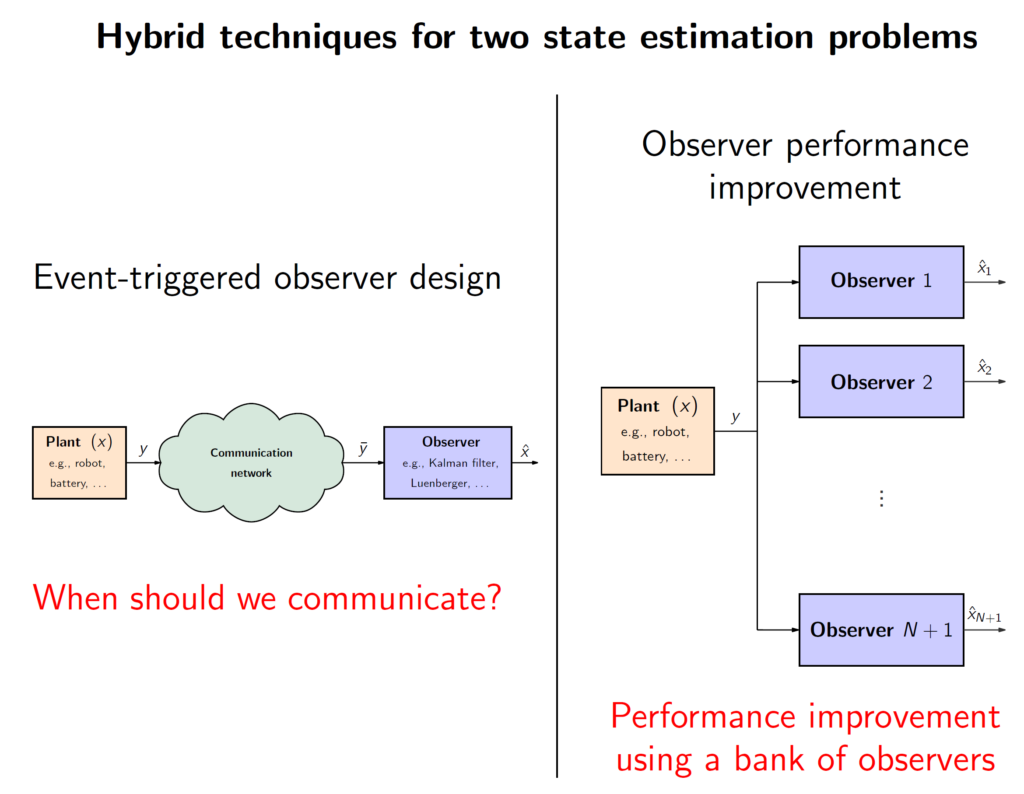
Title: Hybrid techniques for state estimation: event-triggered observer design and observer performance improvement

Abstract:
While hybrid techniques have demonstrated their relevance and strength in a range of control problems, they have been much less exploited in the context of estimation. In this talk we present two scenarios where hybrid techniques can be used to solve two important estimation problems. In the first part, we consider the scenario where a system transmits its measurements to an observer via a digital network. In this context, an important question is when a transmission needs to occur over the network to obtain accurate state estimates, while only sporadically using the communication channel. For this purpose, we present a (hybrid) event-triggered observer design. In the second part of the talk, we use hybrid techniques with the aim of improving the estimation performance of a given robust nominal observer designed for a general nonlinear continuous-time system. We present for this purpose a novel hybrid multi-observer, which consists of the nominal one and additional dynamical systems that differ from the nominal observer only in their output injection gains, that are collectively referred to as modes. We then evaluate the estimation cost of each mode of the multi-observer and, based on these costs, we select one of them at each time instant. Different strategies are proposed to reset, or not, the modes which are not selected at each switching instant. Simulation results show that the nominal observer performances can be significantly improved with the proposed scheme.
Bio:
Elena Petri is a PhD student at CRAN, Université de Lorraine, France, under the supervision of Romain Postoyan (CRAN, Université de Lorraine, France), Dragan Nesic (University of Melbourne, Australia) and Daniele Astolfi (LAGEPP, Université Lyon 1, France). She received her B.Sc. degree in mechanics and mechatronics engineering and the M.Sc. degree in mechatronics engineering from the University of Padova, Italy, in 2017 and 2020, respectively. She performed her M.Sc. thesis at University College Cork, Ireland between September 2019 and March 2020. Her research interests include observers, nonlinear systems and hybrid systems.