When: Thursday 17th of March, 1PM AEDT
Where: The talk will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speaker: Nicholas Barbara
Title: Learning stabilising feedback policies with controller augmentation: the road to online learning
Abstract:
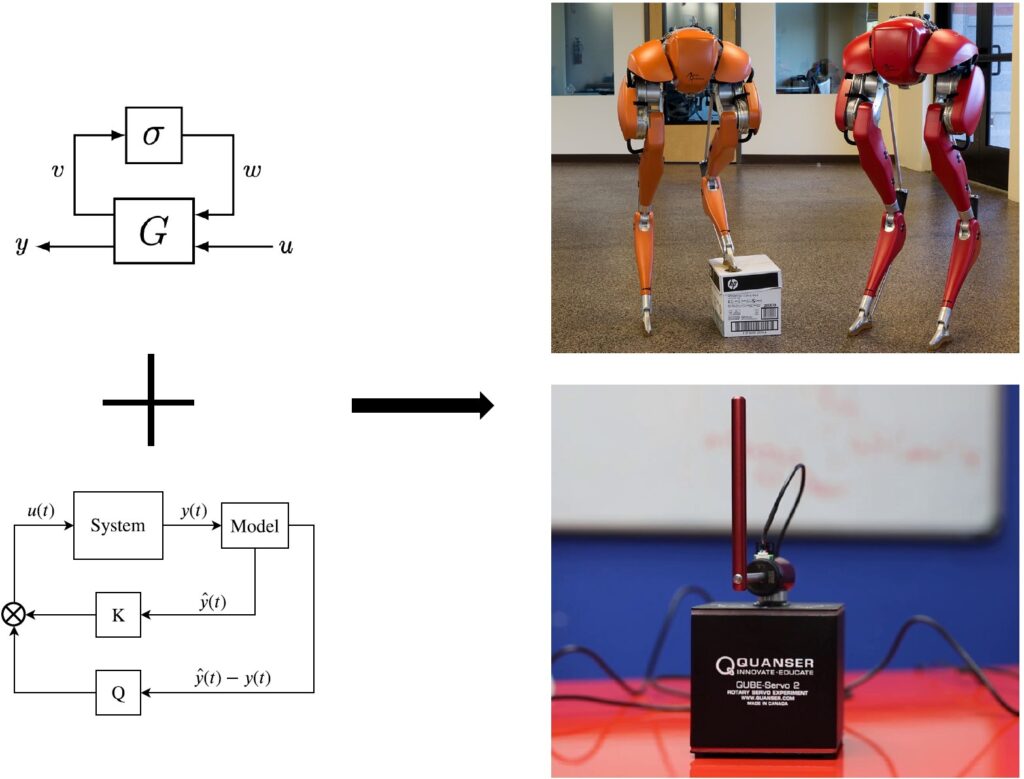
Complex robotic systems are difficult to control across a wide range of tasks. Their restricted versatility motivates the need for learning-based controllers that allow a robot to adapt to new environments during operation. However, most online learning architectures do not have the stability guarantees required for use in safety-critical robotic systems. This seminar presents a promising new method for learning stabilising, nonlinear feedback controllers using controller augmentation, which we expect to be well-suited to the online learning problem. We combine the Youla-Kucera parameterisation with Recurrent Equilibrium Networks to construct a controller architecture with natural closed-loop stability guarantees for linear systems. Together with a reinforcement learning algorithm based on random search, we demonstrate that our architecture facilitates efficient learning and excellent controller performance on a range of partially-observed linear systems. We further discuss extensions to nonlinear systems and real-world experiments, with the aim of applying our methods to online learning in practical robotic systems.
Bio:
Nicholas Barbara received his Bachelor’s degree in Aerospace Engineering (Honours), Physics, and Applied Mathematics at the University of Sydney in 2020. He is currently a Ph.D. student at the Australian Centre for Field Robotics working on robust reinforcement learning and its application to robotic systems. His research interests include optimal control, online learning, and complex systems.