When: Thursday 8th of August, 1:00pm AEST
Where: This seminar will be partially presented at the ACFR seminar area, J04 lvl 2 (Rose St Building) and partially online via Zoom. RSVP
Speaker: Milan Tomy
Title: MCTS Based Dispatch of Autonomous Vehicle under Operational Constraints for Continuous Transportation
Abstract:
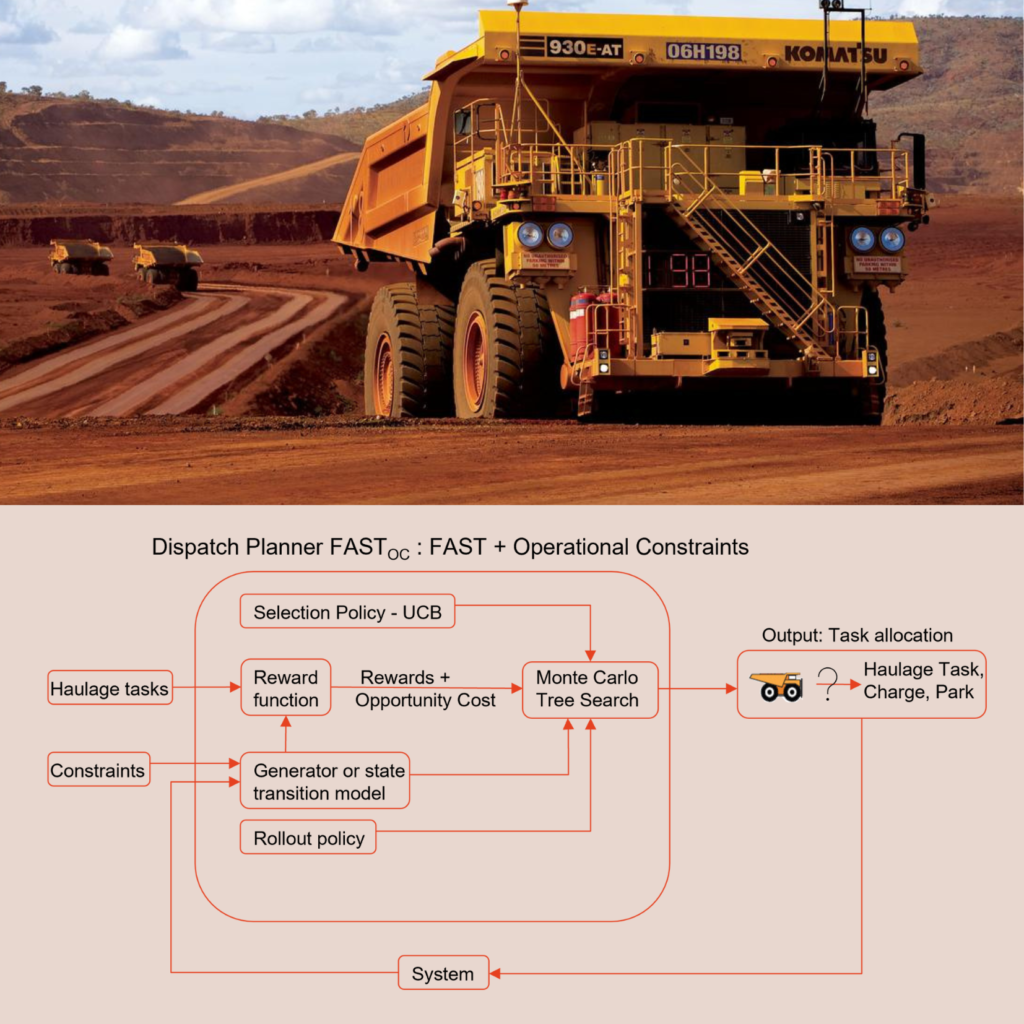
Continuous transportation of material in the mining industry is achieved by the dispatch of autonomous haul-trucks with discrete haulage capacities. Recently, Monte Carlo Tree Search (MCTS) was successfully deployed in tackling challenges of long-run optimality, scalability and adaptability in haul-truck dispatch. Typically, operational constraints are imposed on the mine site for safety of personnel and longevity of equipment. They are satisfied by heuristic controllers or human operators independent of the dispatch planning. In this seminar, I will focus on my recent work regarding the incorporation of operational constraint satisfaction into the MCTS based dispatch planner, Flow-Achieving Scheduling Tree (FAST). Operational constraint violation and satisfaction are modelled as opportunity costs in the combinatorial optimisation problem of dispatch. By utilising MCTS generator models to derive these opportunity costs, explicit cost or penalty formulations are avoided. I will present experimental studies to demonstrate constraint satisfaction with opportunity costs, and the effectiveness of integrating constraints into dispatch planning.
Bio:
Milan is currently a PhD student at RTCMA. She obtained her BTech in Electronics and Communication Engineering from the National Institute of Technology Calicut, India and MSc in Robotics from the University of Birmingham. Her research interests include multi-agent planning, decision making under uncertainty and online constrained optimisation.