When: Thursday 11th of July, 1:00pm AEST
Where: This seminar will be partially presented at the lvl 4 conference area, J18 and partially online via Zoom. RSVP
Speaker: Nathan Wallace
Title: Mission autonomy for constraint-aware information gathering
Abstract:
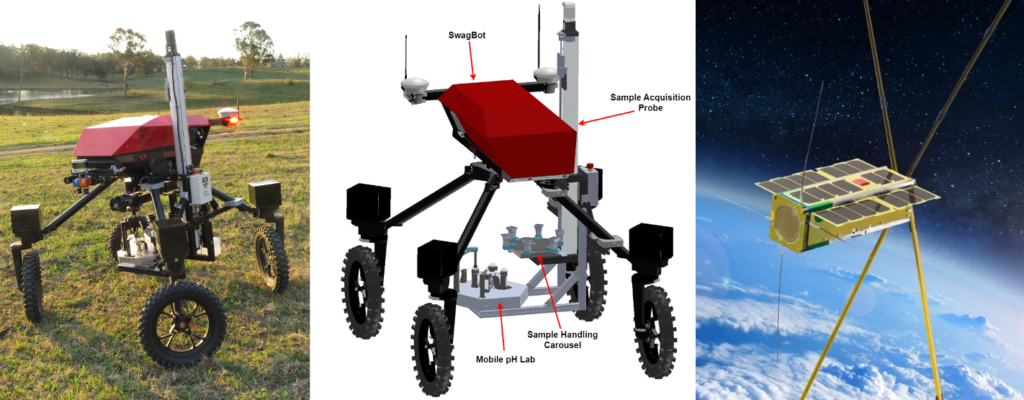
In this talk, I’ll introduce some of my recent work, which has focused on constraint-aware planning for autonomous information gathering missions. First, I’ll detail the problem of adaptive sampling for roving ground platforms under various operational constraints, and its applications both in agricultural monitoring and planetary science. Then, I’ll introduce the problem of intelligent image capture and downlink optimisation for a LEO Earth-observation satellite mission.
Bio:
Nathan Wallace completed his B.E./B.Sc. in Mechatronics, Physics and Computer Science in 2015, and his Ph.D. in Field Robotics in 2020, both at the University of Sydney. He is currently a Research Fellow in the Agriculture and Environment Group at the ACFR, working on motion planning and decision making algorithms for autonomous platforms. His research interests include autonomous navigation of unstructured environments, applied field robotics, and optimal planning for resource-constrained systems.