When: Friday 18th of June, 1pm AEST
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speakers: Dr Daobilige Su, Dr He Kong
Title: Observability of SLAM-Based TDOA Sensor Array Calibration and Source Localization
Abstract:
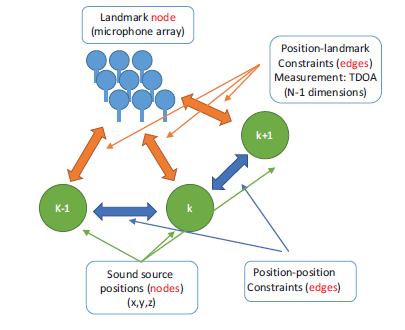
In the existing literature, various formulations of simultaneous localization and mapping (SLAM) have been adopted for joint source localization and calibration of time difference of arrival (TDOA) sensor arrays. Of particular interest in this talk are microphone array-based robot audition systems. Despite of the rapid progress in robot audition, a thorough study on the identifiability question, termed observability analysis here, in the SLAM framework for microphone array calibration and sound source localization, is still lacking in the literature. In our recent work, we have filled the above-mentioned gap via a Fisher information matrix approach. Motivated by the equivalence between the full column rankness of the Fisher information matrix and the Jacobian matrix, we leverage the structure of the latter associated with the SLAM formulation, and present necessary and sufficient conditions guaranteeing its full column rankness, which lead to parameter identifiability. We will thoroughly discuss the 3-D case with asynchronous or synchronous microphone array, respectively. Based on the established conditions, we have also discovered some particular cases where observability is impossible. The tools and concepts used in this article are also applicable to other TDOA sensing modalities such as ultrawide band (UWB) sensors.
Bios:
He Kong received the Ph.D. degree in electrical engineering from the University of Newcastle, Australia. He is currently a Research Fellow at the Australian Centre for Field Robotics, University of Sydney. His research interests include optimization-based estimation/control, robot path planning, active perception, robot audition, and their applications in agriculture, environmental monitoring, etc.
Daobilige Su received the B. Eng. from Zhejiang University, Hangzhou, China, in 2010, the M. Eng. degree in automation and robotics from the Warsaw University of Technology, Warsaw, Poland and the M.Eng. degree in automation from the University of Genova, Genoa, Italy through European Master on Advanced Robotics (EMARO) program in 2012, and the Ph.D. from the Centre for Autonomous System (CAS), UTS, Australia, in 2017. He was a Research Associate with the ACFR from 2017 to 2020. He is currently an Associate Professor with the College of Engineering, China Agricultural University, Beijing, China. His current research interests include field robotics, SLAM, artificial intelligence, computer vision, robot audition and machine learning.