When: Thursday 21st of August, 10:00am AEST
Where: This seminar will be partially presented at the ACFR seminar area, J04 lvl 2 (Rose St Building) and partially online via Zoom. RSVP
Speaker: Amy Phung
Title: Opti-Acoustic Perception for Robust Robotic Operations in Marine Environments
Abstract:
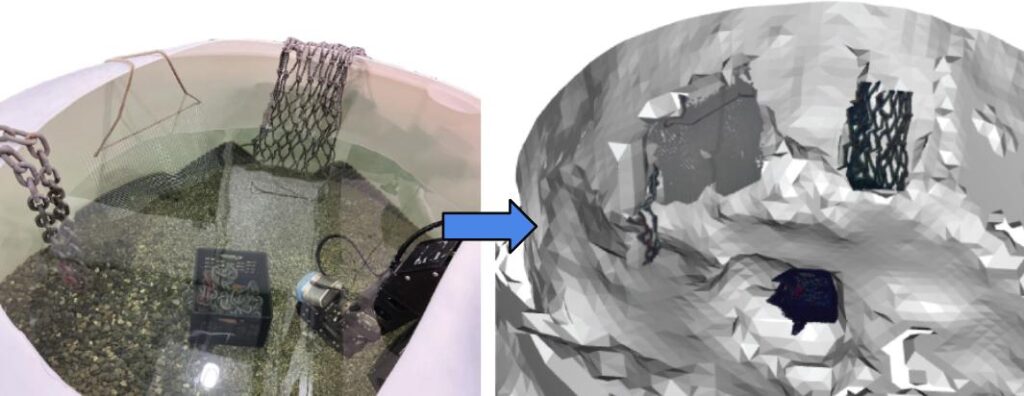
Perception for close-range robotic operations has traditionally relied on optical sensing, which can degrade rapidly in poor visibility and variable lighting. Opti-acoustic methods, which leverage data from optical cameras and sonars, show promise in overcoming these limitations – however, the differences between their sensing modalities makes fusion challenging. This talk presents experimental results from using a multibeam imaging sonar and optical camera in an “eye-in-hand” configuration for underwater manipulation tasks, and discusses its potential in enabling intervention tasks in environments previously considered too turbid to operate in. This talk will also discuss practical considerations for deploying opti-acoustic systems and outline future directions for extending this approach to smaller free-floating vehicles.
Bio:
Amy Phung is a PhD student in the MIT-WHOI Joint Program, advised by Richard Camilli. She earned her bachelor’s degree in Robotics Engineering from Olin College of Engineering in 2021 and is a recipient of the NASA FINESST Research Grant, the NSF Graduate Research Fellowship, and the Link Foundation Ocean Engineering and Instrumentation Fellowship. Her recent research on VR-based control rooms for ROVs, perception and autonomy for autonomous underwater gliders, and opti-acoustic 3D reconstruction methods for underwater manipulators aims to improve robotic ocean exploration methods, particularly in challenging and unstructured environments.