When: Thursday 22th of April, 1pm AEST
Where: This seminar will be presented online, RSVP here.
Speakers: Yijun Chen, Dr Bowen Yi
Title: Recent work accepted for CDC
In this seminar will comprise of two talks by Yijun Chen and Dr Bowen Yi where they will present their recent work which was accepted for the 60th IEEE Conference on Decision and Control (CDC 2021).
Yijun Chen will present on: Social Shaping of Competitive Equilibriums for Resilient Multi-Agent Systems
Bowen Yi will present on: An almost globally convergent observer for visual SLAM without persistent excitation
Abstracts:
Social Shaping of Competitive Equilibriums for Resilient Multi-Agent Systems
This talk presents the study of multi-agent systems with decentralized resource allocations. First, we consider multi-agent systems with static local allocations, and prove from duality theory that under general convexity assumptions, the competitive equilibrium and the social welfare equilibrium exist and agree, which provides a direct way for connecting the two notions and for a more general class of utility functions. Next, we show that the agent utility functions can be prescribed in a family of socially admissible functions, under which the resource price at the competitive equilibrium is kept below a threshold. Finally, we extend the study to dynamical multi-agent systems where agents are associated with dynamical states from linear processes, and we prove that the dynamic the competitive equilibrium and social welfare equilibrium continue to exist and coincide with each other.
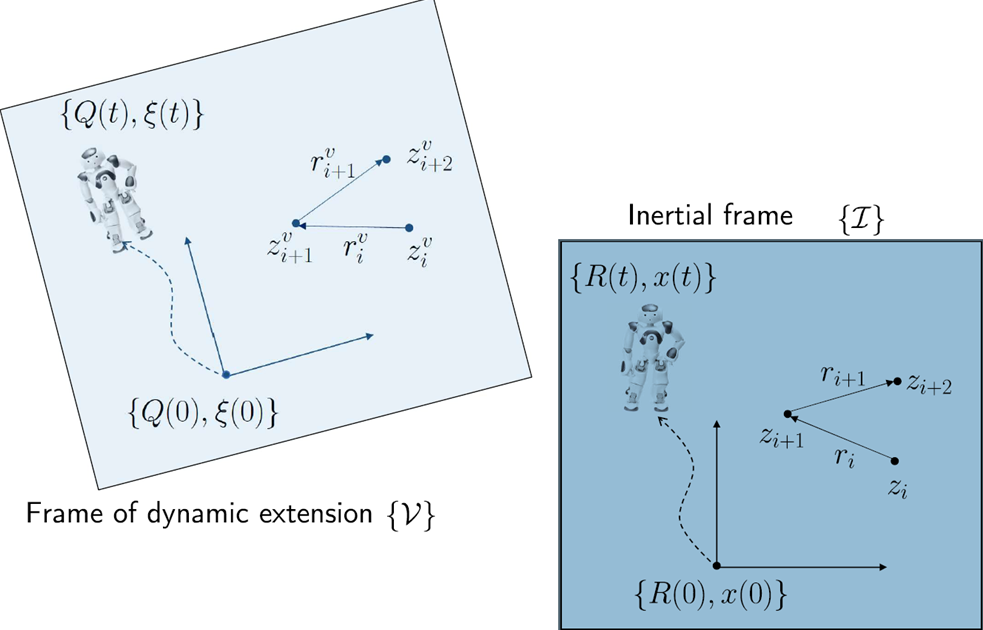
An almost globally convergent observer for visual SLAM without persistent excitation
In this talk we propose a novel observer to solve the problem of visual SLAM, using the information of only the bearing vectors of landmarks observed from a single monocular camera and body-fixed velocities. The system state evolves on the manifold SE(3)*R^3n, on which we design dynamic extensions carefully in order to generate an invariant foliation, such that the problem is reformulated into online parameter identification. Then, following the recently introduced parameter estimation-based observer, we provide a novel and simple solution to address the problem. A notable merit is that the proposed observer guarantees almost global asymptotic stability requiring neither persistent excitation nor uniform complete observability, which, however, are widely adopted in the existing works.
Bios:
Yijun Chen received her Bachelor degree from Beijing University of Posts and Telecommunications in 2019. Since then, she has been a PhD. Student at the Australian Center for Field Robotics. Her research interests include optimal control, differential games and networks.
Bowen Yi obtained his Ph.D. degree from Shanghai Jiao Tong University, China in 2019. From 2017 to 2019 he was a visiting student at Laboratoire des Signaux et Systèmes, CNRS-CentraleSupélec, France. He is currently a postdoc in ACFR, working with Ian. His research interests involve nonlinear and adaptive control, observer design, system identification, and their applications in robotics.