When: Thursday 8th of September, 1pm AEDT
Where: This seminar will be presented online via Zoom, RSVP here.
Speaker: Dr Mehdi Foumani
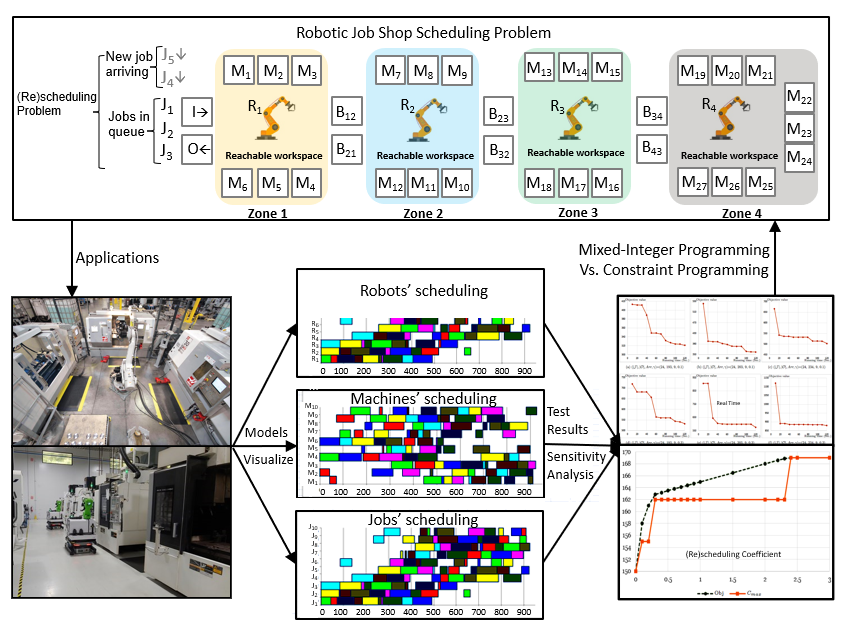
Title: Scheduling of Multi-Robot Job Shop Systems in Dynamic Environments: Mixed-Integer Programming and Constraint Programming
Abstract:
In this presentation, we investigate a dynamic scheduling problem within a job shop robotic system, wherein multiple robotic arms (Rs) are responsible for material handling in a U-shaped arrangement. Each robotic arm has access to specific machines (Ms) based on their distance in the cell layout. A part may need to be exchanged between several robots according to its process plan. For this purpose, intermediate buffers (Bs) are positioned between each pair of consecutive zones. In addition, new jobs arrive at unpredictable times, which in turn necessitates rescheduling taking the system’s current state into account. To tackle this problem, firstly, a Mixed-Integer Programming (MIP) model is devised. Secondly, three distinct Speed-up Constraints derived from the problem’s inherent characteristics are designed and implemented to accelerate the MIP model’s solving procedure. Afterward, the problem is formulated using Constraint Programming (CP) approach. The performance of the CP model and the MIP model are compared through solving various random instances. Finally, an analysis is performed on the buffers’ pick-up criterion, rescheduling priorities, and robots’ speed and energy consumption.
Bio:
Mehdi Foumani is a senior research fellow in the Australian Centre for Field Robotics, University of Sydney. His work explores how heuristic procedures and algorithms can help mine optimisation. His interest is in methods for solving scheduling optimisation programs in practice. Before joining the University of Sydney, he has worked as a research fellow in the University of Melbourne mainly in the area of sustainable transport and logistics.