When: Thursday 26th of October, 1pm AEDT
Where: This seminar will be partially presented at the lvl 4 Conference Room (J18) and partially online via Zoom. RSVP
Speaker: Prof Vincent Frémont
Title: Sharing Visual-Inertial Data for Collaborative Decentralized Simultaneous Localization And Mapping
Abstract:
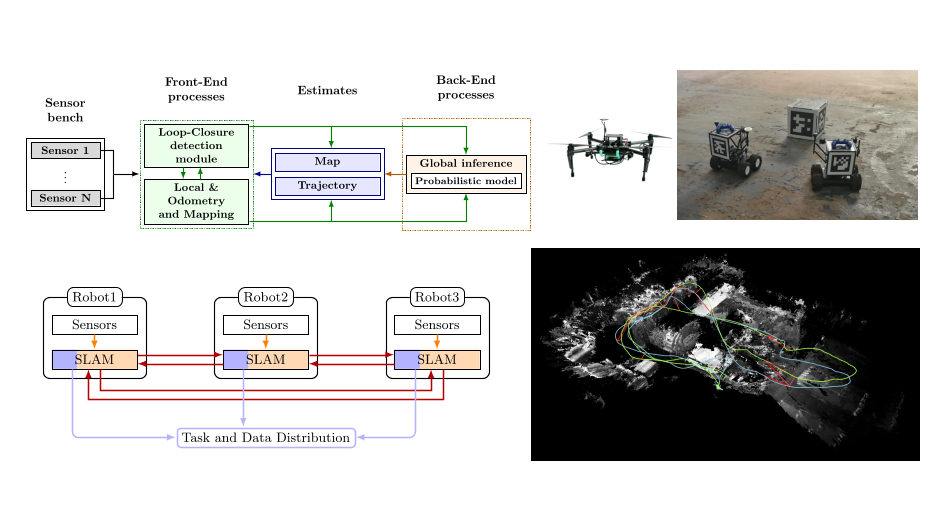
Building on the maturity of single-robot Simultaneous Localization And Mapping (SLAM) algorithms, collaborative SLAM has brought significant gains in terms of efficiency and robustness, but has also raised new challenges to cope with informational, network and resource constraints. Several multi-robot frameworks have been developed for visual SLAM, ranging from highly-integrated and fully-centralized architectures to fully distributed and decentralized methods. However, many proposed architectures compromise the autonomy of the robots in fusing the data processed by the other agents to enhance their own estimation accuracy. In this talk, I will present three methods to share visual-inertial information between robots, based on rigid, condensed and pruned visual-inertial packets. I will also describe a common collaborative SLAM architecture to organize the computation, exchange and integration of such packets. The proposed methods have been evaluated on the EuRoC dataset and on our custom dataset AirMuseum. Experiments showed that the proposed methods allow the agents to build, exchange and integrate consistent visual-inertial packets, and improve their trajectory estimation accuracy up to several centimeters.
Bio:
Prof. Vincent Frémont received the M.S. degree in automatic control and computer science from the Ecole Centrale de Nantes, France, in 2000 and the Ph.D. degree in automatic control and computer science from the Ecole Centrale de Nantes, France, in 2003. From 2005 to 2018, he was an Associate Professor at the Université de Technologie de Compiègne (UTC) within the Heudiasyc Lab, UMR CNRS 7253. Since 2018, he is a Full Professor at Ecole Centrale de Nantes within the ARMEN team at the LS2N Lab, UMR CNRS 6004. His research interests belong to perception systems and scene understanding for autonomous mobile robotics with an emphasis on computer vision, deep learning and multi-sensor fusion. He has published more than 80 papers in international journals and conference papers.
Since 2019, he is the coordinator of the Erasmus Mundus Japan-Europe Master on Advanced Robotics (JEMARO) programme, and since 2021, he is the Director of International Relations of Centrale Nantes.