When: Thursday 17th of June, 1pm AEST
Where: This seminar will be presented at the Rose Street Seminar area (J04) and also streamed online via Zoom, RSVP here.
Speaker: Stuart Eiffert
Title: Simultaneous Prediction and Planning in Crowds using Learnt Models of Social Response
Abstract:
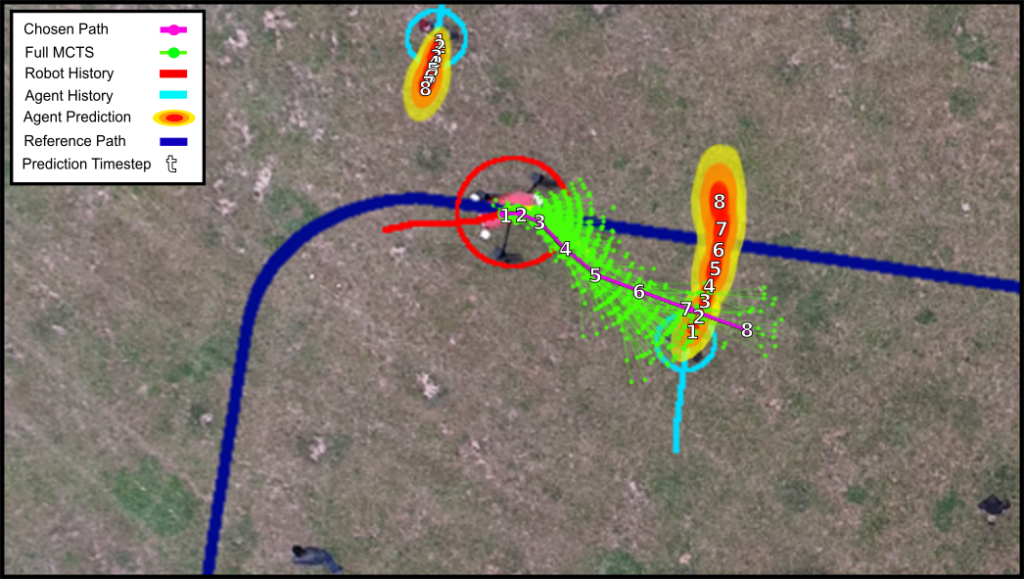
Significant challenges remain before we can expect to see the widespread adoption of mobile robot’s in unstructured environments alongside pedestrians or animals. Accurate predictions of the future motion of nearby individuals can be critical to safe and efficient path planning in crowds or herds and an understanding of the dependency of these predictions on the future motion of the robot is required in order to effectively use them to inform planning. This work focuses on how predictive models of motion can be extended to account for the planned action of a robot, proposing an approach to dynamic path planning that uses learnt models of social response coupled with a sampling based path planner for simultaneous prediction and planning (SPP). Additional challenges faced in navigating shared and unstructured environments are also addressed, including predicting the uncertain branching nature of agent motion during social interactions, and overcoming on-board limitations of mobile robots — such as resource and sensing constraints — in order to achieve extended autonomy.
Bio:
Stuart Eiffert joined the ACFR in late 2017 and is now in the final stages of a PhD within the Agriculture group, supervised by Salah Sukkarieh. His work focuses on robotic path planning around pedestrians and animals, developing approaches that make use of learnt models of social response in crowds and herds. Stuart has previously worked as a research associate at the Centre for Autonomous Systems at UTS developing human-robot interaction systems for use in public transport and currently works at the startup company Presien, where he develops computer vision based safety systems for heavy industries.