When: Thursday 11th of May, 1pm AEST
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom. RSVP
Speaker: Dr Danish Khan
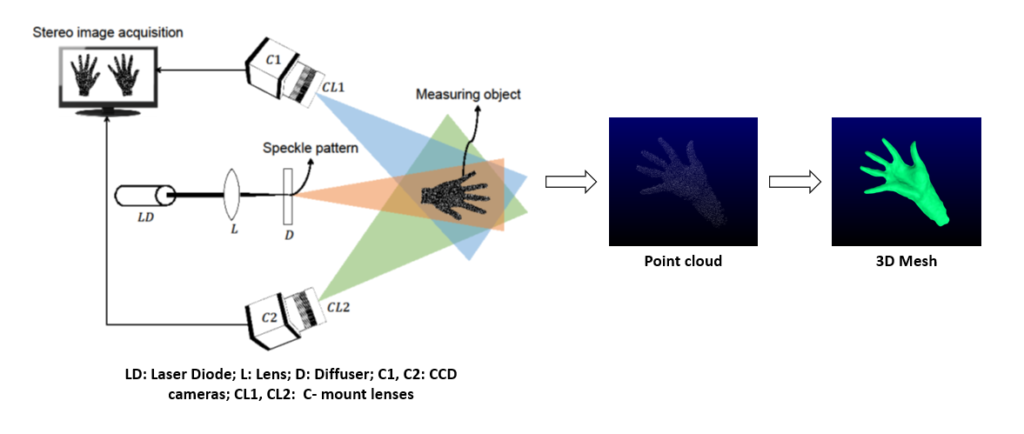
Title: Single-shot active 3D sensing based on stereo vision and adaptable speckle pattern projection
Abstract:
State-of-the-art 3D sensors, such as laser line profilers or structured light scanners, require multiple patterns or frames to reconstruct dense and accurate 3D profiles. The movement of the objects during the scanning process often leads to inaccurate measurements due to sequential image acquisition. Single-shot structured techniques are robust to motion, but the prevalent challenge in single-shot structured light methods is compromised accuracy. Tracking sparse features for stereo matching in speckle projected images can achieve higher accuracy but at the cost of low 3D density.
This work presents methods to acquire accurate sparse 3D points and dense depth by pre-processing the speckle images to reduce the speckle noise. Further, to increase the optimal working range of the system, an adaptable laser speckle projection system is proposed. The system adapts itself to achieve the desired speckle size when the measuring distance of the objects changes.
Bio:
Danish is a postdoctoral researcher under Dr. Donald Dansereau. He completed his Ph.D. from Kyungpook National University, South Korea. He was affiliated with the Centre for ICT and Automotive Convergence, KNU, before joining the ACFR.