When: Thursday 6th of July, 1pm AEST
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom. RSVP
Speaker: AProf James Richard Forbes
Title: Subsea Navigation using a DVL-INS and a Laser Scanner
Abstract:
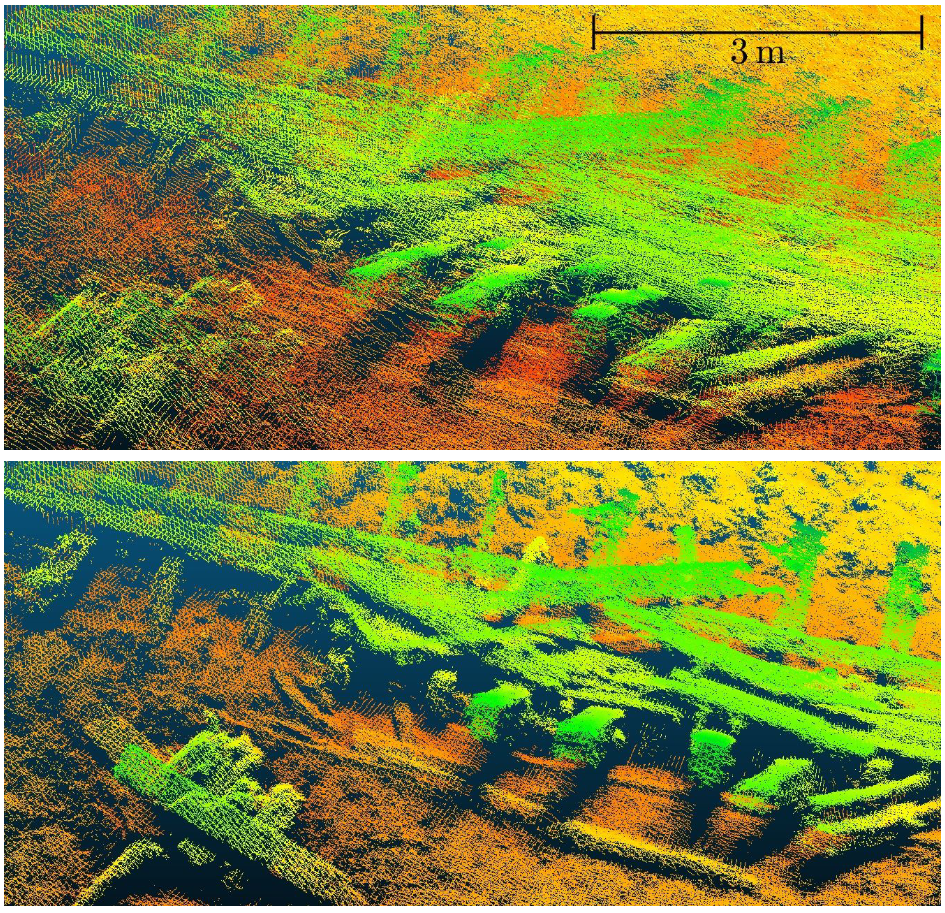
This talk will discuss underwater vehicle (UV) navigation and mapping using a subsea laser scanner. The use of UVs for inspection and mapping tasks, such as infrastructure inspection, environmental monitoring, and subsea archeology, relies on a reliable navigation solution. UVs are typically equipped with a Doppler velocity log (DVL) and an inertial navigation system (INS) that provide a dead-reckoned solution. This talk will discuss the use of a subsea laser scanner to combat drift in the dead-reckoned DVL-INS solution, enabling the generation of high-resolution, self-consistent maps of underwater environments and structures. In particular, this talk will discuss a means to generate laser-based submaps, detect loop closures, and correct navigation drift in the DVL-INS solution. This talk is based on the recent IEEE Trans. Robotics paper: https://arxiv.org/abs/2301.02297
Bio:
James Richard Forbes received the B.A.Sc. degree in Mechanical Engineering (Honours, Co-op) from the University of Waterloo, Waterloo, ON, Canada, and the M.A.Sc. and Ph.D. degrees in Aerospace Science and Engineering from the University of Toronto Institute for Aerospace Studies (UTIAS), Toronto, ON, Canada, in 2008 and 2011, respectively. James is currently Associate Professor of Mechanical Engineering at McGill University, Montreal, QC, Canada. In recognition of his research contributions James was awarded a William Dawson Scholar award in 2018. James is a Full Member of the Centre for Intelligent Machines (CIM) and a Member of the Group for Research in Decision Analysis (GERAD). James was awarded the McGill Associate for Mechanical Engineering (MAME) Professor of the Year Award in 2016, the Engineering Class of 1944 Outstanding Teaching Award in 2018, and the Carrie M. Derick Award for Graduate Supervision and Teaching in 2020. The focus of James’ research is navigation and control of robotic and aerospace systems. James is currently an associate editor of the Int. Journal of Robotics Research. James’ research group, the Dynamics, Estimation, and Control in Aerospace and Robotics (DECAR) group, conducts fundamental and applied research in collaboration with various industrial companies in Quebec, Canada, and internationally.