When: Thursday 20th of July, 1pm AEST
Where: This seminar will be partially presented at the J12 Lecture Theatre 123 and partially online via Zoom. RSVP
Speaker: Nicholas Barbara
Title: The Youla-REN: Learning Over all Robust Stabilising Controller for Nonlinear Systems
Abstract:
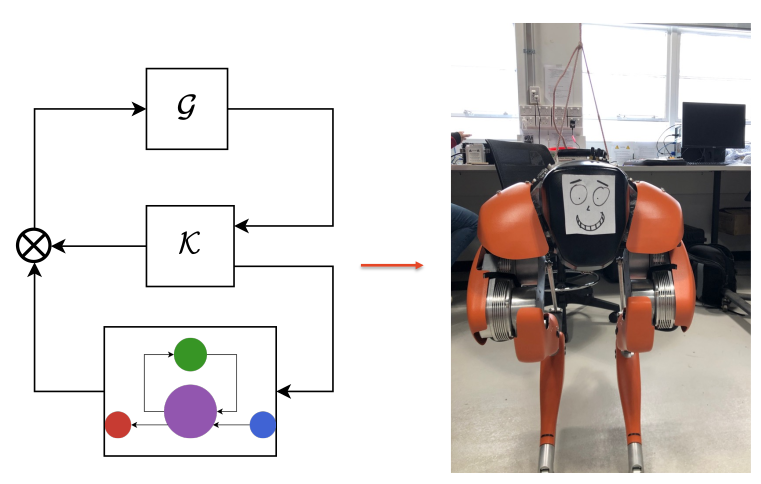
Deep reinforcement learning has been the driving force behind many recent successes in learning-based control, with applications ranging from video games to robotic locomotion. As its popularity grows, there is increasing need for a learning framework that offers the stability and robustness guarantees of classical control methods while still being fast and flexible for learning in complex environments. This seminar will present a controller architecture based on a nonlinear version of the Youla parameterisation and the recently proposed Recurrent Equilibrium Network (REN) class of models. We will prove that the resulting “Youla-REN” automatically satisfies stability (contraction) and user-tunable robustness (Lipschitz) conditions on the closed-loop system. This means it can be used for safe learning-based control with built-in stability and robustness guarantees. We test the new policy class on some simple reinforcement learning tasks, and find that it performs similarly to existing learning-based and optimal control methods while also ensuring stability and exhibiting improved robustness to adversarial disturbances. Our implementation of the Youla-REN is built on our new Julia package RobustNeuralNetworks.jl (https://github.com/acfr/RobustNeuralNetworks.jl).
Bio:
Nic Barbara is a third year PhD candidate at the Australian Centre for Robotics, under the supervision of Professor Ian Manchester. He received his Bachelor’s degree in Aerospace Engineering (Honours), Physics, and Applied Mathematics from the University of Sydney in 2020. His current research involves developing new techniques in robust reinforcement learning for application in complex robotic systems. His research interests include optimal and learning-based control, spacecraft GNC, and a little bit of asteroseismology.