When: Thursday 13th of June, 1:00pm AEST
Where: This seminar will be partially presented at the ACFR seminar area, J04 lvl 2 (Rose St Building) and partially online via Zoom. RSVP
Speaker: Dr Alexandre Cardaillac
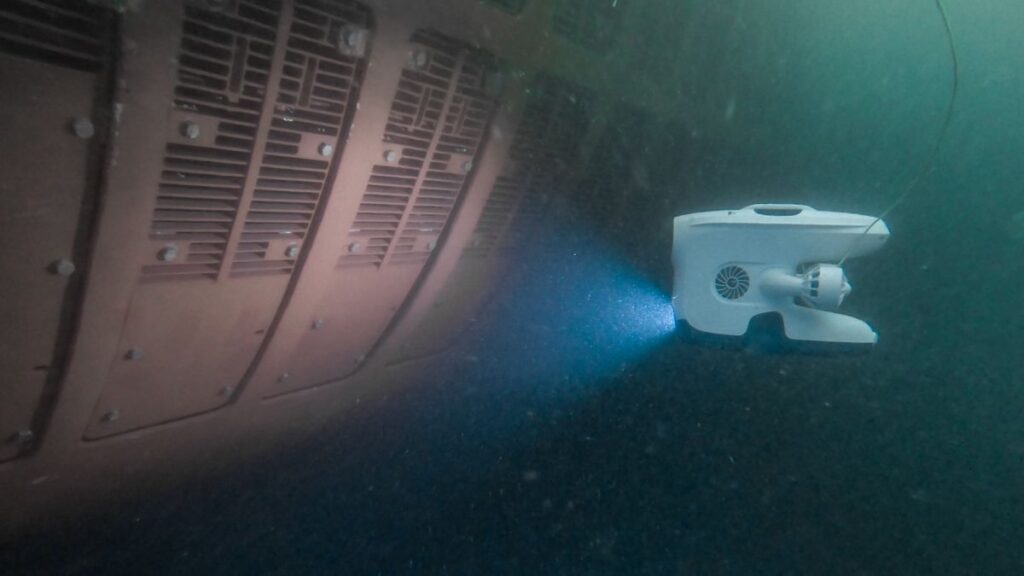
Title: Towards autonomous underwater navigation and perception for end-to-end ship hull inspection
Abstract:
In a world where maritime activities have significant and distinctive impacts in many sectors, where over 5000 ships operate daily, safety concerns from the structural integrity of the hulls are raised. These concerns are not only related to the ship’s crew safety if there are apparent damages to the hull, but also related to the environmental cause. Indeed, an unmaintained hull will provoke a significant rise of the fuel consumption over time. Although successful, traditional inspection methods in dry docks fail to be fast-paced, which would decrease the ship’s down time and cost. Remote inspections are promising to address this issue. ROV-based inspections enable efficient visual documentation while the ship is still in water and docked. Further automating the process increases the efficiency since it brings consistency and faster data processing. With the inspection culture and regulations in mind, we aim to achieve a fully automated inspection of underwater ship hulls, i.e., from the deployment of the vehicle to the assistance of the surveyor to generate the inspection reports, including autonomous navigation, mapping, and anomaly detection. The complete solution was tested in ten harbors and on six ships of different size and strutures to ensure the adaptability of the methods and consistency of the results. By taking advantage of the available sensors, it was possible to move along the hull with high precision at the same time as mapping it.
Bio:
Alexandre Cardaillac is a Postdoctoral Research Associate in Underwater Computational Imaging at the University of Sydney. He is part of the ARIAM Research Hub, the Australian Centre for Robotics, and the Robotic Imaging Lab.
Alexandre received a Bachelor of Information Technology from the Nantes School of Digital Innovation in 2019 and his M.Sc. degree in Artificial Intelligence with Speech and Multimodal Interaction from the Heriot-Watt University in 2020 and received the award of the best M.Sc. dissertation for his work on uncertainty estimation in deep neural networks. He completed his Ph.D. degree in Engineering in 2023 with the Department of Marine Technology at the Norwegian University of Science and Technology, as part of the Applied Underwater Robotics Laboratory. He led scientific demonstrations and collaborated with innovation-driven industries. His work was recognised by the European Commission as key innovation.