When: Thursday 2nd of May, 1:00pm AEST
Where: This seminar will be partially presented at the ACFR lab lvl 4 conference room (J18) and partially online via Zoom. RSVP
Speaker: Katie Luo
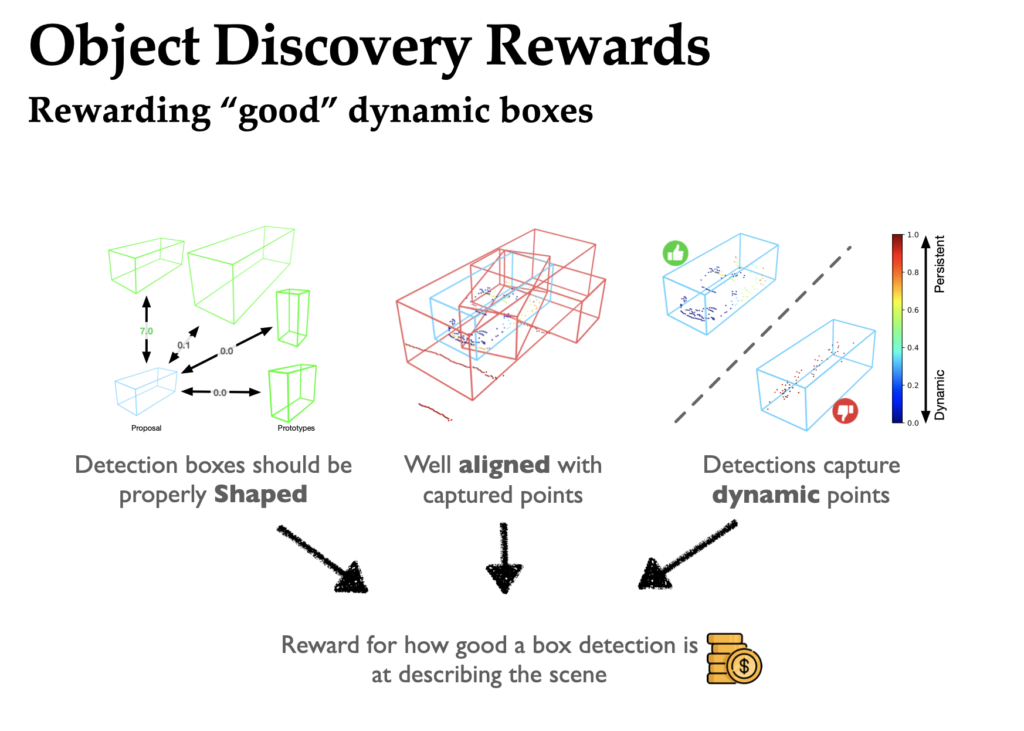
Title: Unsupervised Objects Discovery from LiDAR Scans for Autonomous Driving
Abstract:
Self-driving promises to revolutionize the current transportation paradigm, with the potential of providing a safer and more efficient solution for transportation. A critical component for safe self-driving lies in its ability to perceive the world and sense its surroundings. Despite the rapid progress of 3D perception algorithms designed for this field, a majority rely on supervised training from 3D bounding box labels which are both expensive and labor intensive to obtain. The aim of my research is to shift the current paradigm away from these supervised training methods, and instead train 3D object detectors without any labels at all. In this talk, I will briefly go over the field of label-free object detection. I will then present studies into how this can be achieved, and discuss future research directions that I will pursue in this area.
Bio:
Katie is a Ph.D. student at Cornell University, advised by Prof. Kilian Q. Weinberger. Her research interests mostly lie in machine learning and computer vision for autonomous driving. Prior to her Ph.D, Katie was an AI Resident at Uber ATG (now part of Aurora), and she received a B.Sc. and M.S. in Electrical Engineering and Computer Science from the University of California, Berkeley.