The video for this talk is now available at https://www.youtube.com/watch?v=rJ8_bFl9Ucg
When: Thurs 19th of Nov, 10a AEDT
Where: This seminar will be presented online, RSVP here.
Speaker: Dr Vivian Suzano Medeiros, CPTI/PUC-Rio, Rio de Janeiro
Title: Trajectory Optimization for Hybrid Wheeled-Legged Robots in Challenging Terrain
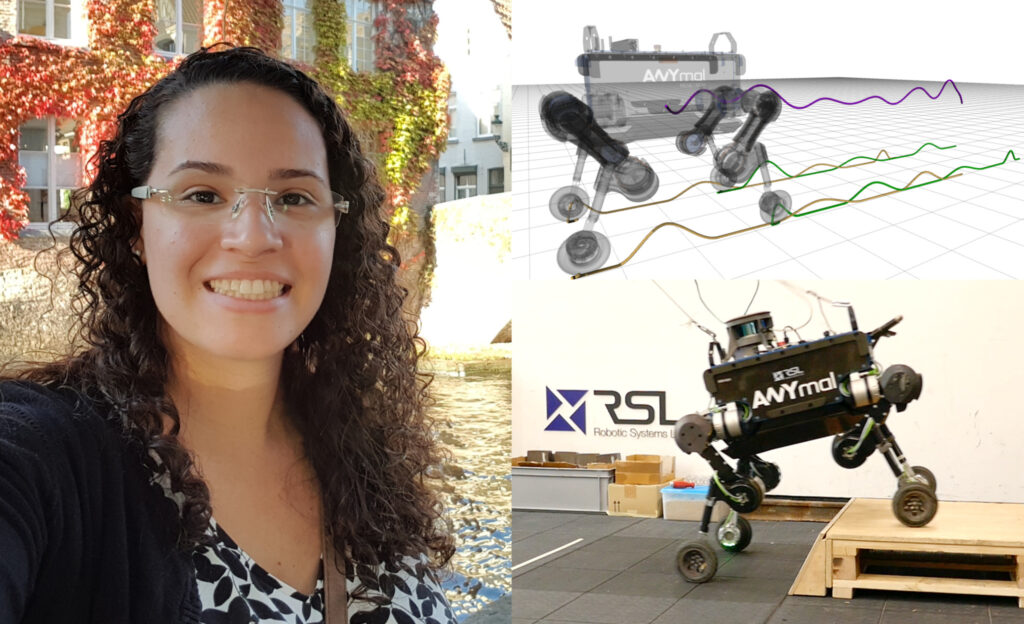
Abstract: Wheeled-legged robots are an attractive solution for versatile locomotion in challenging terrain. They combine the speed and efficiency of wheels with the ability of legs to traverse challenging terrain. In general, the challenges with wheeled-legged locomotion involve trajectory generation and motion control for trajectory tracking. In this talk, we focus on the trajectory optimization task for wheeled-legged robots navigating in challenging terrain. In particular, a motion planning framework that optimizes over the robot’s base position and orientation, and the wheels’ positions and contact forces in a single planning problem, taking into account the terrain information and the robot dynamics. The knowledge of the terrain map allows the optimizer to generate feasible motions for obstacle negotiation in a dynamic manner, at higher speeds. Two different formulations allow for either purely driving motions, where obstacle negotiation is enabled by the legs, or hybrid driving-walking motions, which are able to overcome discontinuities in the terrain profile. The optimization is formulated as a Nonlinear Programming Problem (NLP) and the reference motions are tracked by a hierarchical whole-body controller that computes the torque actuation commands for the robot. The trajectory optimization framework is verified on the quadrupedal robot ANYmal equipped with non-steerable torque-controlled wheels in simulations and experimental tests.
Bio: Vivian Suzano Medeiros holds a doctorate degree in Robotics and Control Systems (2020), a master’s degree in Mechanical Engineering (2015) and a bachelor’s degree in Control and Automation Engineering (2012), all from the Pontifical Catholic University of Rio de Janeiro (PUC-Rio). She was a Visiting Ph.D. Student at the Autonomous Systems Lab, at ETH Zürich, Switzerland, for one year, between 2018 and 2019. During this time, she worked on a trajectory optimization framework for the quadrupedal robot ANYmal equipped with torque-controlled wheels. She is currently a researcher at the Research Center on Inspection Technology (CPTI/PUC-Rio), Rio de Janeiro, Brazil, working with the development of embedded control systems for autonomous underwater inspection systems.