When: Tuesday 24th of November, 1pm AEDT
Where: This seminar will be presented online via Zoom, RSVP here.
Speaker: Dhanoop Karunakaran
Title: Concrete scenario generation with a focus on edge cases for the safety assessment of highly automated vehicles
Abstract:
The history of driving automation shows a gradual decline in accident rates, which will decrease further with the advent of highly automated vehicles (HAVs). Advanced vehicles bring many benefits than just safety, such as convenience for elderly and disabled people and a positive environmental impact. Indeed, the progress of this technology is essential.
Modern autonomous vehicles will undoubtedly include machine learning and probabilistic techniques. These algorithms used within a non-deterministic world significantly complicate the safety assessment process. In addition, the HAVs must handle the responsibility of safe navigation as the driver is optional, so there will be no one to guarantee safety. Despite the many safety challenges in testing autonomous vehicles (AVs), a broad deployment seems imminent. Understanding the issues in the safety assessment is more crucial than ever. The first contribution of this thesis is addressing the challenges of testing HAVs, and the thesis presents a comprehensive set of issues regarding the assessment of safety. The most logical way of evaluating advanced vehicles is through distance-based testing, performed by driving many kilometers. This approach is time consuming and expensive as challenging scenarios that occur in the real world are not frequent. Recently, academia and industry have suggested that scenario-based testing (SBT) could be complementary to large-scale on-road testing as its focus is biased toward relevant high-risk scenarios. In SBT, we select a relevant traffic situation (e.g. a lane change) and generate many variations of this real-world maneuver to then evaluate system under test (SUT). However, a naive approach encounters issues such as parameter space explosion, potentially requiring an infeasible number of scenarios to find challenging situations. The brute-force and random-search methods are not the ideal solution in an ample search space as they may not find critical situations. As a second contribution, the thesis presents two novel scenario generation methods that enable the evaluation of SUT by biasing the learning towards the edge cases. The methods utilise the parameter space based on expert knowledge for generating scenarios in a pedestrian crossing traffic context. By enabling the learning towards challenging scenarios, we ensure the generation of problematic test cases where the SUT failed to function adequately.
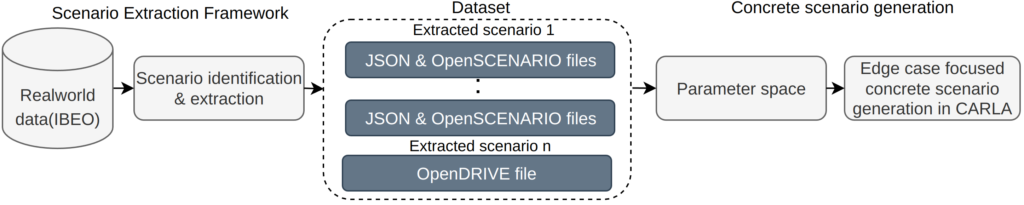
The expert knowledge-based parameter space may not represent the realistic behaviour of the traffic participants. So, capturing the behaviours from the real world and encoding them in the parameter space is essential. This thesis introduces an edge-case focused scenario generation approach based on a parameter space built from real-world data as a third contribution. We use a novel method to convert collected raw data into parametric representations of relevant scenarios. Finally, we generate realistic concrete scenarios, combining our data-driven parameter space with a reinforcement learning (RL) based method. This methodology generates concrete scenarios by biasing learning towards edge cases.
Bio:
Dhanoop received a B. Tech. degree from Mahatma Gandhi University, India and an M.S. degree from the University of Wollongong. He is currently working towards a Ph.D. degree at the University of Sydney, Sydney, Australia. His research interest is in the safety evaluation of autonomous vehicles.