When: Thurs 11th of June, 1p
Where: This seminar will be presented online, RSVP here.
Speaker: John Gardenier
Title: How Now Lame Cow: Automatic Lameness Assessment for Dairy Cattle with 3D Sensors
Abstract: Lameness in dairy cattle is a prevalent health issue impacting animal welfare and economic performance. Automatic lameness detection using 3D sensors is proposed in this thesis to automate the current time-intensive manual locomotion scoring, resulting in more objective and frequent monitoring of individual lameness.
My thesis investigated observer consistency for conventional absolute locomotion scoring, and introduced a pairwise preference scoring method where observers score which of two passings is more lame. Scaling methods were used to convert pairwise scores into a continuous locomotion score.
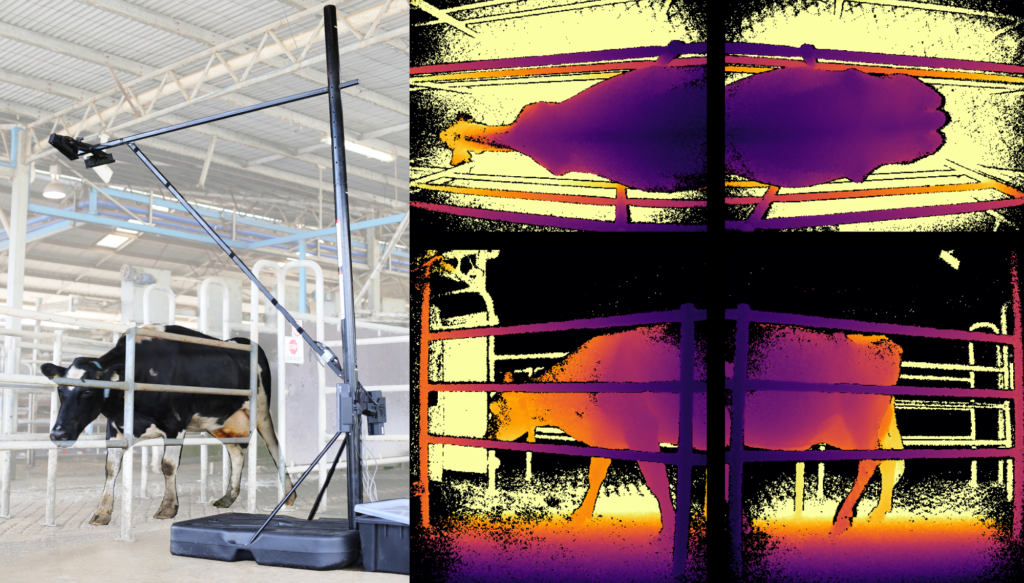
Sensors to record 3D cattle kinematics were evaluated on data quality, positioning, and cost. A prototype with overhead and side-on Kinect-v2 sensors was developed, and locomotor keypoints were detected in 2D imagery using convolutional neural networks. Tracking, in particular of hooves and carpal/tarsal joints, was performed after projection of detections into 3D.
Hand-engineered gait metrics were extracted from the resulting keypoint trajectories including a variety of hoof placement, spine curvature, and hip displacement metrics. Gait metrics were used to perform regression, classification, and pairwise preference prediction of ground truth locomotion scores. Prediction of pairwise locomotion rank was found to perform better than predicting absolute locomotion.
My thesis work proposed a new research direction for lameness detection by rethinking (automatic) lameness monitoring as a relative measurement instead of absolute measurement. Both manual pairwise preference scoring and classification of pairs have shown encouraging results towards the ultimate goal of accurate on-farm automatic lameness monitoring.
Bio: John graduated with a B.Sc. and M.Sc. in Aerospace Engineering from Delft University of Technology in 2014 and submitted his PhD thesis in February 2020 at ACFR.