When: Thursday 26th of August, 1pm AEST
Where: This seminar will be presented online via Zoom, RSVP here.
Speaker: Tara Bartlett
Title: Fast Traversal of Unstructured Terrain by a Bipedal Robot in Unfamiliar Environments
Abstract:
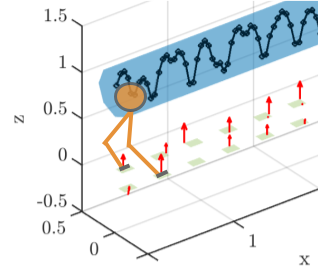
Replicating the innate human ability to walk and run in a range of environments has been an area of interest in the robotics community for a few decades. Great progress has been made with bipedal robots able to perform impressive manoeuvres, or traverse a variety of challenging environments. However, combining these capabilities in real-time remains an open problem due to the complexity and computational load. This presentation will discuss the state of the art methods in both traversability and dynamic motion planning, as well as the challenges involved in integrating these abilities into a real-time algorithm.
Bio:
Tara completed a Bachelor’s degree in Aeronautical Engineering in 2019 and is now a PhD student under the supervision of Ian Manchester. She is working on linking terrain perception and online dynamic trajectory planning for bipedal robots like Cassie, designed by Agility Robotics.