When: Thursday 21st of March, 1:00pm AEDT
Where: This seminar will be partially presented at the ACFR seminar area, J04 lvl 2 (Rose St Building) and partially online via Zoom. RSVP
Speaker: Dr Milad Ramezani
Title: Advancements in Robust SLAM
Abstract:
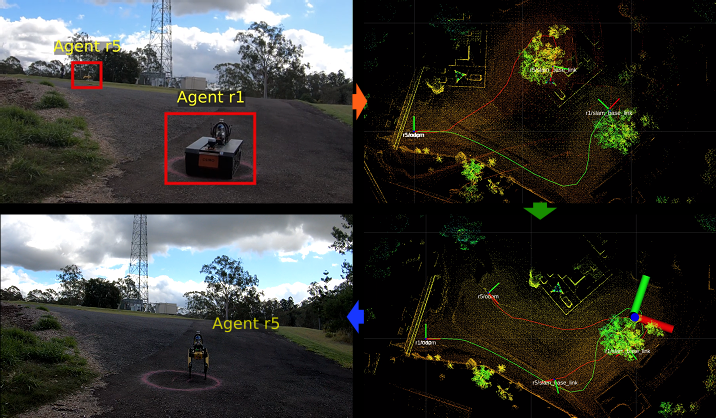
In this talk, I will discuss some of my recent research on integrating deep learning into lidar SLAM systems. I will introduce Wildcat, a lidar SLAM system developed at CSIRO Data61. I will then delve into my latest works, such as lidar place recognition, deep robust multi-robot re-localisation, and pose-graph attentional networks. Additionally, I will discuss new developments aimed at incorporating deep models into the design of Wildcat toward its next generation.
Bio:
Milad is currently a Research Scientist within the Robotic Mapping and Understanding team at CSIRO Robotics in Brisbane. He completed his PhD research at the University of Melbourne (2015-2018), focusing on localisation using GNSS/IMU integration and visual-inertial odometry. Following his PhD, Milad pursued postdoctoral research at the Dynamic Robot Systems Group at Oxford Robotics Institute (ORI), where he developed robust and accurate localisation and mapping systems for various robotic platforms. He has made contributions to 3D lidar SLAM, 3D reconstruction, visual and teach-repeat techniques. Prior to his current role at CSIRO Data61, Milad held a postdoctoral research fellowship (2021-2022) with the CSIRO Robotics group. His research interests include SLAM, sensor fusion, data representation learning, GNSS signal processing, field robotics.