When: Friday 9th of June, 9am AEST
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom. RSVP
Candidate: Yijun Chen
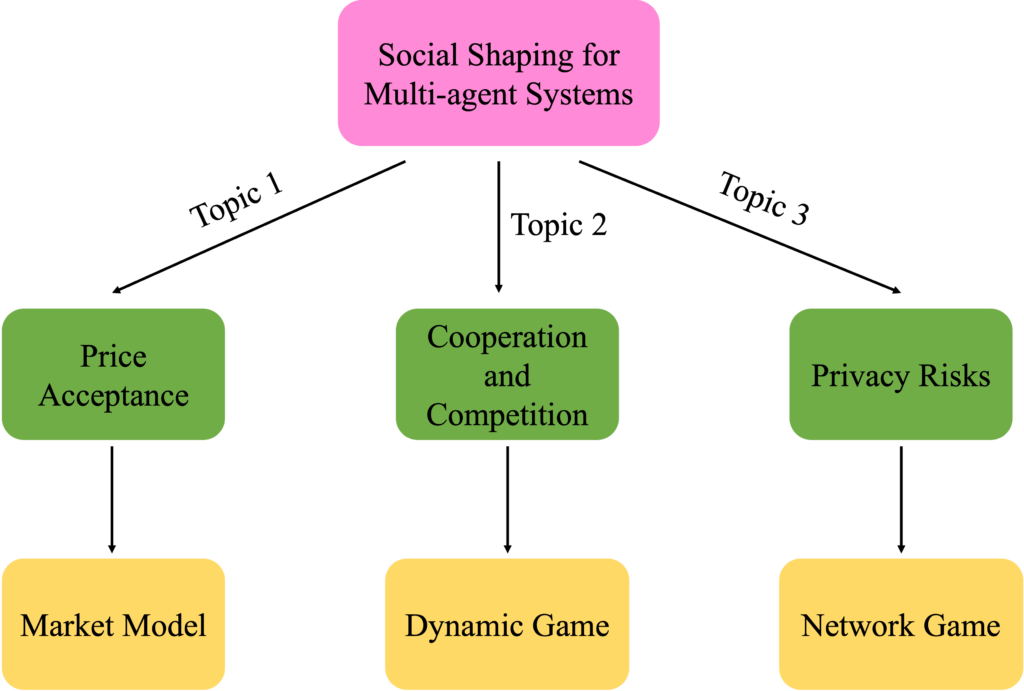
Title: Social Shaping for Multi-Agent Systems
Abstract:
This thesis addresses social shaping problems in multi-agent systems: price acceptance, agent cooperation and competition, and privacy risks. We propose solutions to promote fairness, facilitate negotiations, and ensure privacy protection. For the price acceptance problem, we define acceptable functions for resource allocation, ensuring fair and efficient distribution. Through a case study using the Regional Integrated Climate-Economy model, we analyze cooperative and competitive solutions, providing insights into international negotiations and climate mitigation measures. To reveal privacy risks, we develop a robust system identification algorithm that learns network structures. Finally, we contribute to the design of privacy-aware algorithms that can offer privacy guarantees for a multi-agent system. In summary, this thesis offers practical solutions to social shaping problems in multi-agent systems. Our research advances fairness, negotiation facilitation, and privacy protection. These contributions enable better decision-making and utilization of multi-agent systems in various domains.
Bio:
Yijun Chen received B.Eng. Degree in Digital Media Technology from Beijing University of Posts and Telecommunications, Beijing, China in 2019. She is currently working towards a Ph.D. Degree in Control Systems Engineering with the Australian Center for Field Robotics, School of Aerospace, Mechanical and Mechatronic Engineering, University of Sydney, Sydney, Australia. Her current research interests are mainly about learning, decision making, optimization and control in multi-agent systems, which is closely related to game theory, control theory, network science and optimization. In the future, She wishes to contribute more to the areas of networked control systems and cooperative/non-cooperative control and optimization, with applications to cyber-physical systems, manufacturing systems, smart cities and so on.