When: Thursday 21st of October, 1pm AEDT
Where: This seminar will be presented online via Zoom, RSVP here.
Speaker: Darren Tsai
Title: A sensor fusion approach to domain adaptation in 3D object detection
Abstract:
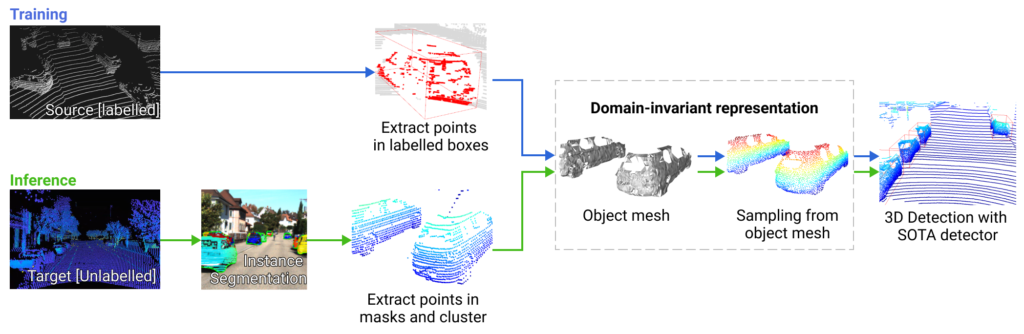
3D object detection is an active field of research that has recently found great success in LiDAR-only methods. An issue that arises when using LiDAR-only methods however is that point clouds captured by different LiDARs have vastly different point distributions. With LiDAR manufacturing advancing and new point distributions proposed, it requires annotated datasets for these new LiDARs and also the re-training of state of the art networks. This presentation illustrates the setup and approach in using sensor fusion to bridge this domain gap. The outcomes of this approach allows state of the art detectors to be used without additional training data in the unlabelled and unseen LiDAR domain.
Bio:
Darren received his Bachelors in Electrical Engineering from Sydney University. He is now a PhD student in the Intelligent Transport Systems group at ACFR.