When: Thursday 25th of March, 1pm AEDT
Where: This seminar will be presented online, RSVP here.
Speaker: Dr Liyang Liu
Title: Active and Interactive Mapping with Dynamic Gaussian Process Implicit Surfaces for Mobile Manipulators
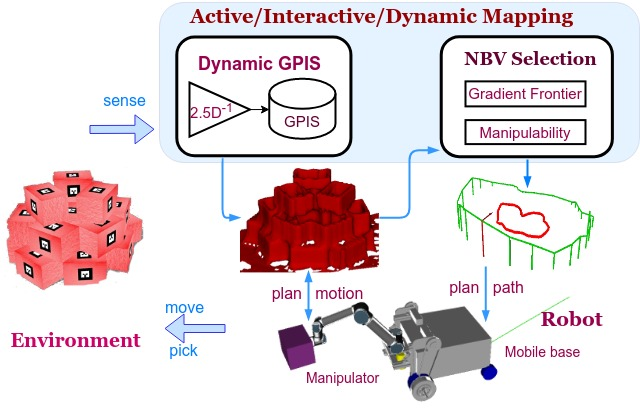
Abstract: In this seminar, we present an interactive probabilistic mapping framework for a mobile manipulator picking objects from a pile. The aim is to map the scene, actively decide where to go next and which object to pick, make changes to the scene by picking the chosen object, and then map these changes alongside. The proposed framework uses a novel dynamic Gaussian Process (GP) Implicit Surface method to incrementally build and update the scene map that reflects environment changes. Actively the framework provides the next-best-view, balancing the need for picking object reachability with map information gain (IG). To enforce a priority of visiting boundary segments over unknown regions, the IG formulation includes an uncertainty gradient-based frontier score by exploiting the GP kernel derivative. This leads to an efficient strategy that addresses the often conflicting requirement of unknown environment exploration and object picking exploitation given a limited execution horizon. We demonstrate the effectiveness of our framework with software simulation and real-life experiments.
Bio: Liyang Liu is a research fellow in the Australian Centre for Field Robotics, University of Sydney. Her work focuses on robotic perception and equipment automation. Her interests are in 3D Reconstruction, SLAM, computer vision, robot exploration, path planning, optimisation and scientific computing. Before joining the University of Sydney, she has worked as a research fellow and research engineer in the University of Technology Sydney, on multiple robotic research projects with external partners. These includes the Automation in Construction (as postdoc, 2019-20), Climbing Robot for the Sydney Harbor Bridge Inspection and Condition Assessment (as research engineer, 2014-15) and Assistive Robotic Technology for Aged Care (as research engineer, 2013). Her PhD work was on observability and convergence of urban visual SLAM. Prior to academia, she has worked as a software/DSP engineer for many R&D companies in the private sector, including Silverbrook Research, Sonartech Atlas and Syrinx Speech Systems.