When: Thursday 1st of July, 1pm AEST
Where: This seminar will be presented online via Zoom, RSVP here.
Speaker: Kunming Li
Title: Adaptive Pedestrian Trajectory Prediction towards Generic Autonomous Vehicle Use Cases
Abstract:
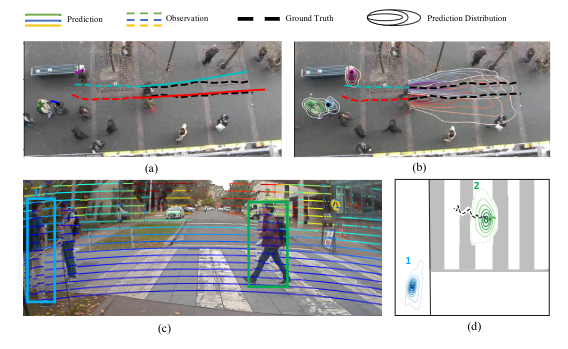
Autonomous vehicle navigation in shared pedestrian environments requires the ability to predict future crowd motion both accurately and with minimal delay. Understanding the uncertainty of the prediction is also crucial. We propose a novel Graph Convolutional Neural Network (GCNN)-based approach, Attentional-GCNN, which aggregates information of implicit interaction between pedestrians in a crowd by assigning attention weight in edges of the graph. Our model can either output a probabilistic distribution or faster deterministic prediction, demonstrating applicability to autonomous vehicle use cases where either speed or accuracy with uncertainty bounds are required. To further improve the training of predictive models, we propose an automatically labelled pedestrian dataset collected from an intelligent vehicle platform representative of real-world use. Through experiments on a number of datasets, we show our proposed method achieves an improvement over the state of the art by 10% on Average Displacement Error (ADE) and 12% on Final Displacement Error (FDE) with fast inference speeds.
Bio:
Kunming Li received his Bachelor of Engineering from Australian National University in 2018. He joined the ACFR in late 2018 and is currently a 3rd year PhD student in ITS group, where he is working on the interaction between autonomous vehicles and pedestrians.