When: Thursday 29th of July, 1pm AEST
Where: This seminar will be presented online via Zoom, RSVP here.
Speaker: Dr Julie Stephany Berrio Perez
Title: Camera-LIDAR Integration: Probabilistic Sensor Fusion for Semantic Mapping
Abstract:
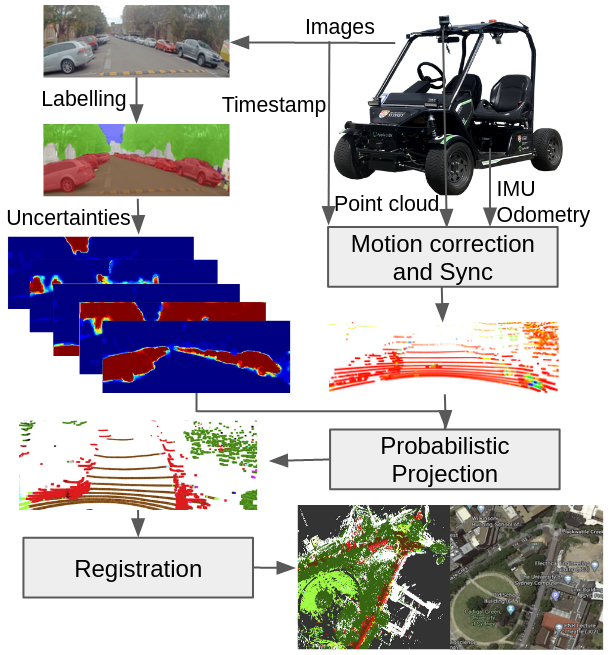
An automated vehicle operating in an urban environment must be able to perceive and recognise objects and obstacles in a three-dimensional world for navigation and path planning. In order to plan and execute accurate and sophisticated driving manoeuvres, a high-level contextual understanding of the surroundings is essential. Due to the recent progress in image processing, it is now possible to obtain high-definition semantic information in 2D from monocular cameras, though cameras cannot reliably provide the high accuracy 3D information provided by lasers. The fusion of these two sensor modalities can overcome the shortcomings of each individual sensor, though there are a number of important challenges that need to be addressed in a probabilistic manner. In this paper we address the common, yet challenging, LIDAR/camera/semantic fusion problems which are seldom approached in a wholly probabilistic manner. Our approach is capable of using a multi-sensor platform to build a three-dimensional semantic voxelized map that considers the uncertainty of all of the processes involved. We present a probabilistic pipeline that incorporates uncertainty from the sensor readings (cameras, LIDAR, IMU and wheel encoders), compensation for the motion of the vehicle, and heuristic label probabilities for the semantic images. We also present a novel and efficient viewpoint validation algorithm to check for occlusions within the camera frame. A probabilistic projection is performed from the camera images to the LIDAR point cloud. Each labelled LIDAR scan then feeds into an octree map-building algorithm that updates the class probabilities of the map voxels every time a new observation is available.
Bio:
Julie Stephany Berrio Perez received the B.S. degree in Mechatronics Engineering in 2009 from Universidad Autonoma de Occidente, and the M.E. degree in 2012 from the Universidad del Valle, Cali, Colombia. She received the Ph.D. from the University of Sydney, Australia, in 2021. Her research interest includes semantic mapping and long-term map maintenance.