When: Thursday 6th of May, 1pm AEST
Where: This seminar will be presented online, RSVP here.
Speaker: Dr Mao Shan
Title: Cooperative Perception and Its Safety and Robustness Implications for Connected and Automated Vehicle Operations
Abstract:
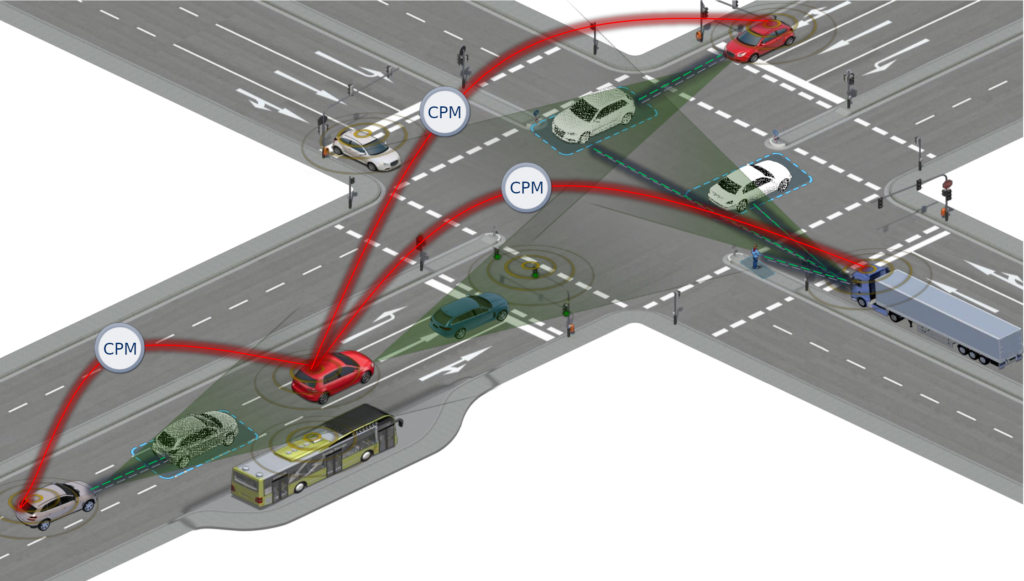
Cooperative perception, or collective perception (CP), is an emerging and promising technology for intelligent transportation systems (ITS). It enables an ITS station (ITS-S) to share its local perception information with others by means of vehicle-to-X (V2X) communication, thereby achieving improved efficiency and safety in road transportation. This talk will present the recent progress on the development of a connected and automated vehicle (CAV) and intelligent roadside unit (IRSU), and demonstrate through a collection of representative experiments how CAVs achieve improved safety and robustness when perceiving and interacting with vulnerable road users (VRU), using the CP information in different traffic environments and with different setups. It is also addressed in the talk the handling of standardised collective perception messages (CPMs) received from other ITS-Ss, and passing them through a pipeline of CP information coordinate transformation with uncertainty, multiple road user tracking, and eventually path planning/decision-making within the CAV.
Bio:
Mao Shan received his Ph.D. degree from The University of Sydney in 2014. He was a Research Associate at ACFR from 2014 to 2016, and a Research Fellow at Nanyang Technological University, Singapore, from 2016 to 2017. Since August of 2017, Mao has joined the intelligent transportation systems group at ACFR as a Research Fellow. His research interests include autonomous systems, V2X communication, cooperative perception, sensor fusion, localisation and tracking.