When: Thursday 13th of April, 1pm AEST
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom
Speaker: Yiduo Wang
Title: Efficient and Elastic LiDAR Reconstruction for Large-Scale Exploration Tasks
Abstract:
High-quality reconstructions and understanding the environment are essential for robotic tasks such as localisation, navigation and exploration. International competitions such as the DARPA Subterranean Challenge demonstrate the difficulties that reconstruction methods must address in the real world and the necessity for methods to be scalable and efficient in large-scale scenarios.
Guided by these motivations, we present a multi-resolution volumetric reconstruction system that efficiently integrates long-range LiDAR scans with high resolution, incorporates motion undistortion, and employs an Atlas of submaps to produce an elastic 3D reconstruction.
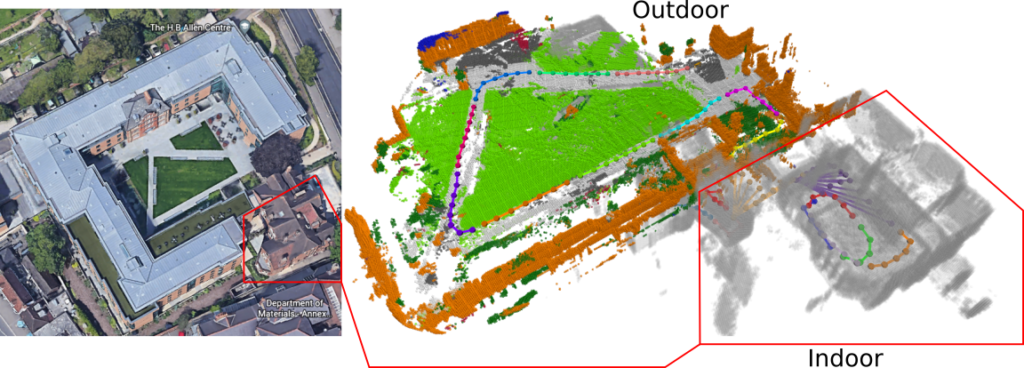
We further propose four principled strategies for spawning and fusing submaps based on spatial analysis as well as the relative uncertainties between poses in a SLAM pose graph. We also incorporate semantic information into the LiDAR reconstruction to detect indoor-outdoor transitions and adjust reconstruction parameters online.
Bio:
Yiduo is a postdoctoral researcher recently joining ACFR under Dr. Viorela Ila.
Yiduo was a DPhil student at the Oxford Robotics Institute (ORI) and a member of the Dynamic Robots Systems Group (DRS) under Assoc. Prof. Maurice Fallon. He holds an MRes Robotics degree awarded by UCL, where he worked with Prof. Simon Julier.