When: Thursday 20th of May, 1pm AEST
Where: This seminar will be presented at the Rose Street Seminar area (J04) and also streamed online, RSVP here.
Speaker: Fletcher Fan
Title: Learning Koopman mappings for stable nonlinear identification
Abstract:
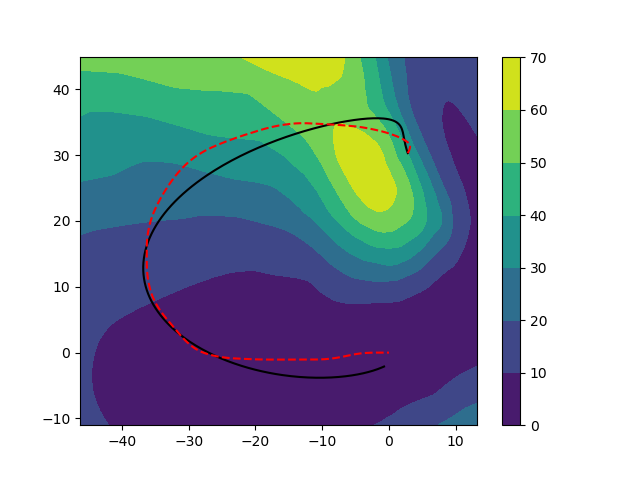
System identification is a ubiquitous problem in robotics and other engineering disciplines, and recent advances in deep neural networks hold the promise of more expressive models for complex nonlinear systems. However, guaranteeing stability of neural network models remains an open problem. In this talk, I will present some recent work on learning mappings that transform the nonlinear system into a linear system via neural networks. The problem of enforcing stability of the model is then considerably simplified. These ideas are grounded in Koopman operator theory, and motivated by recent results from Bowen and Ian on the equivalence between contraction (a form of nonlinear stability) and stability of the Koopman linear dynamics. I will discuss some of the advantages and challenges of the proposed method, and present some preliminary simulation results.
Bio:
Fletcher Fan received his Bachelor of Mechatronics Engineering from the University of Sydney in 2016. He has been a PhD student at the ACFR since 2017, and his research interests include safety and robustness in imitation learning and reinforcement learning.