When: Thursday 11th of August, 1pm AEDT
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speaker: Rowan McAllister (Toyota Research Institute)
Title: Model what matters: planning-aware perception and prediction for autonomous driving
Abstract:
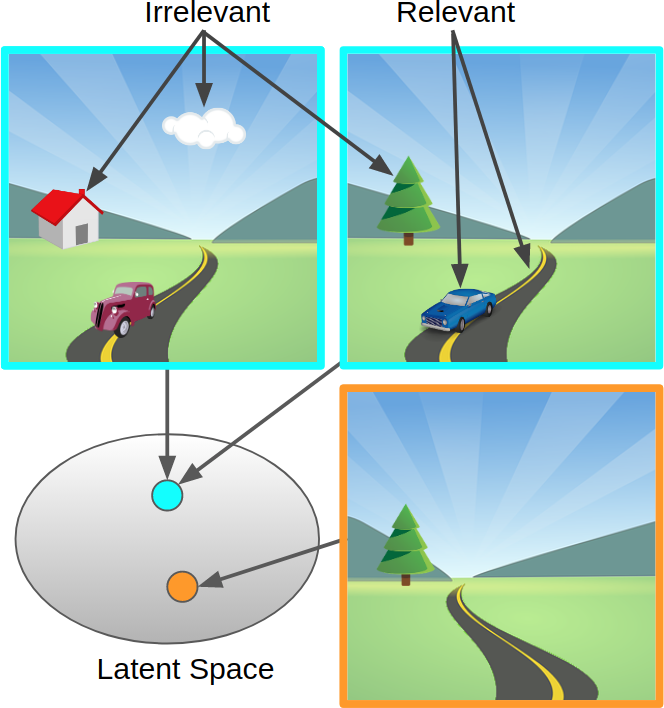
Autonomous vehicle software is typically structured as a modular pipeline of individual components (e.g., perception, prediction, and planning) to help separate concerns into interpretable sub-tasks. Even when end-to-end training is possible, each module has its own set of objectives used for safety assurance, sample efficiency, regularization, or interpretability. However, intermediate objectives do not always align with overall system performance. For example, optimizing the likelihood of a trajectory prediction module might focus more on easy-to-predict agents than safety-critical rare behaviors like jaywalking. Similarly, perceptual detections and representations need not be concerned with every detail in the scene. This talk summarizes some recent work to represent visual scenes and train trajectory forecasting models to be more accurate where accuracy matters most for downstream planning:
- Learning Invariant Representations for Reinforcement Learning without Reconstruction, https://arxiv.org/abs/2006.10742
- Control-Aware Prediction Objectives for Autonomous Driving, https://arxiv.org/abs/2204.13319
- Risk-Aware Prediction for Robust Planning (soon on arxiv)
Bio:
Rowan McAllister is a former student of ACFR (undergrad and masters) with Robert Fitch and Thierry Peynot working on autonomous navigation over unstructured terrain. Rowan later obtained his PhD at the University of Cambridge working on Gaussian processes and reinforcement learning, later a postdoc at the University of California, Berkeley working on deep reinforcement learning, and is now a machine learning scientist at the Toyota Research Institute in California.