When: Thursday 11th of March, 1pm AEDT
Where: This seminar will be presented online, RSVP here.
Speaker: Dr Mehdi Foumani
Title: Operations Research Techniques for Robotic Automated Storage and Retrieval Systems
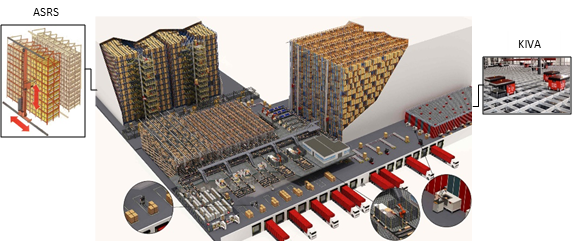
Abstract: In this presentation, we consider a scheduling-based optimisation of robotic automated storage and retrieval system (ASRS) where a Cartesian robot (or automatic stacker crane) picks and palletises items onto a mixed pallet for any order. The aim is to maximise the throughput of the ASRS, rather than technical domains such as robot navigation and mission control. This ASRS not only retrieves orders in an optimal sequence, but also creates an optimal store ready pallet of any order. Adapting the mixed-integer programming to warehousing, the decision to be made includes finding the optimal sequence of orders, and optimal sequence of items inside each order, that jointly maximise the throughput. In the first phase, we develop a simple collision avoidance strategy for the robot movement sequence. Due to the complexity of the problem, the second phase is attacked by a Cross-Entropy (CE) method. To evaluate the performance of the CE, a computational analysis is performed over test problems. The results obtained from the CE are compared to those of the optimal solutions obtained using CPLEX. Finally, we present our current plan for the use of automation in real-time hazardous material warehousing.
Bio: Mehdi Foumani is a senior research fellow in the Australian Centre for Field Robotics, University of Sydney. His work explores how heuristic procedures and algorithms can help Pit-to-Port Optimisation. His interest is in methods for solving scheduling optimisation programs in practice. Before joining the University of Sydney, he has worked as a research fellow in the University of Melbourne and Monash University, mainly in the area of sustainable transport and logistics.