When: Thursday 6th of October, 1pm AEDT
Where: This seminar will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speaker: Graeme Best (UTS)
Title: Planning Algorithms for Multi-Robot Systems
Abstract:
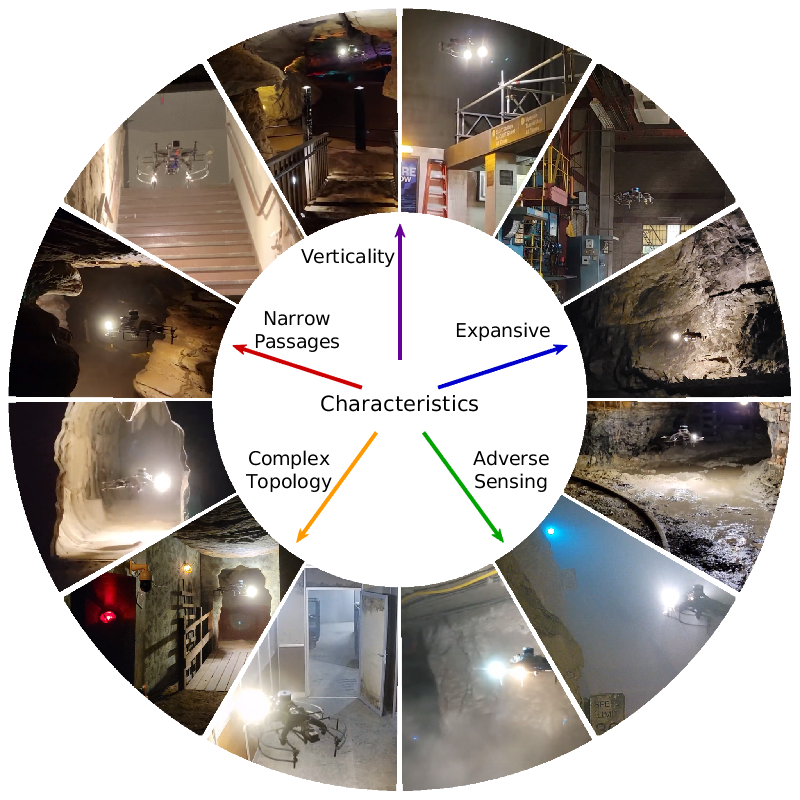
I will present several planning and coordination algorithms for multi-robot systems and their application to real-world problems in outdoor environments. A fundamental task of robotic systems is to use on-board sensors and perception algorithms to understand high-level semantic properties of an environment. The performance of perception algorithms can be greatly improved by planning the motion of the robots to obtain high-value observations. This motivates the problem of active perception, where the goal is to plan the observation viewpoints for a team of robots while considering the motion and communication constraints, as well as the perception objectives of the task at hand. I will introduce several algorithms that share this theme, including decentralised Monte Carlo tree search (Dec-MCTS), a resilient aerial autonomy pipeline, learning of behaviour trees, topology-based world prediction, and assignment algorithms for high-impact decisions. These algorithms have been deployed on-board real robots in contexts including the DARPA Subterranean Challenge, high-speed ground robot surveillance, and marine environmental monitoring.
Bio:
Graeme Best is a Lecturer in robotics at the University of Technology Sydney (UTS). From 2018 to 2022 he was a Postdoctoral Scholar with Oregon State University’s Collaborative Robotics and Intelligent Systems Institute. He completed his PhD in 2018, titled “Planning Algorithms for Multi-Robot Active Perception”, with the Australian Centre for Field Robotics at The University of Sydney and has also worked with the DSTG Maritime Division and CSIRO Autonomous Systems Lab. Dr Best’s research broadly involves developing autonomy for multi-robot systems and he has delivered contributions ranging from new fundamental algorithms to full-scale system demonstrations with a vast range of robot platforms. He is the winner or finalist of awards at top robotics conferences (RSS, ICRA, IROS) and won the first round of the DARPA Subterranean Challenge (with Carnegie Mellon University).