When: Thursday 7th of April, 1PM AEDT
Where: The talk will be partially presented at the Rose Street Seminar area (J04) and partially online via Zoom, RSVP here.
Speaker: Yurui Zhang and Nicholas Harrison
Title: Recent work on adaptive walking and adaptive sampling
This seminar will comprise of two talks, by Yurui Zhang and Nicholas Harrison where they will present their recent work.
Abstracts:
Adaptive Walking with Movement Primitives for Bipedal Robot:
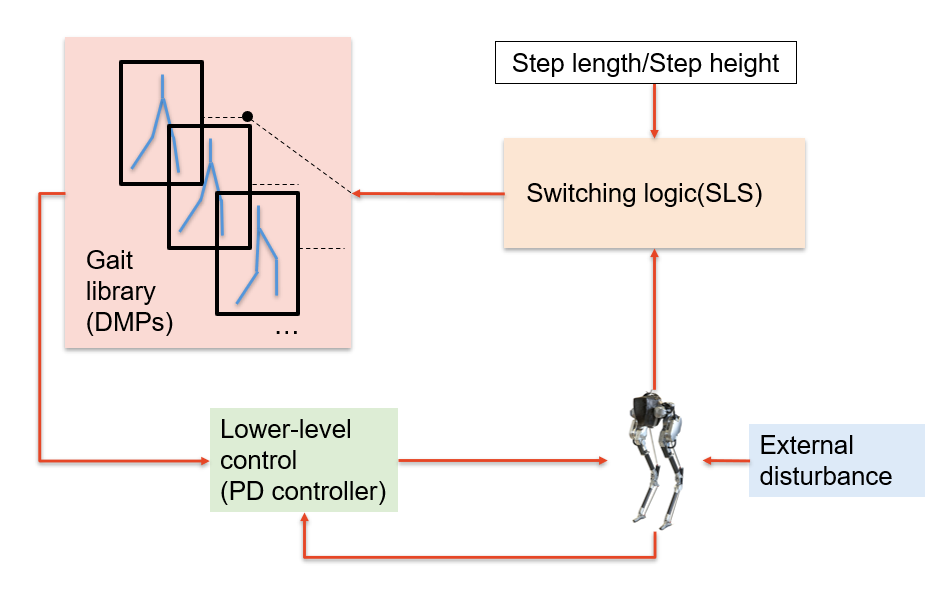
The walking control of the bipedal robot is one of the most attractive and challenging topics in the area of robotics. Its versatility on rough terrains and the freedom of choosing the contact points has led to increased interest in completing activities that humans are capable of performing. However, it still remains challenging for real-world deployment because of high dimensional, under-actuated, and hybrid robot dynamics. Apart from that, walking on uneven terrain introduces external disturbance because of the unmodelled ground, requiring the robot to employ a non-periodic and flexible contact sequence. This seminar will present a framework based on Dynamic Motion Primitives and System Level Synthesis to generate robust and adaptive walking gaits under external disturbance.
Adaptive Sampling and Prospecting: Gathering Information in Scientific Missions:
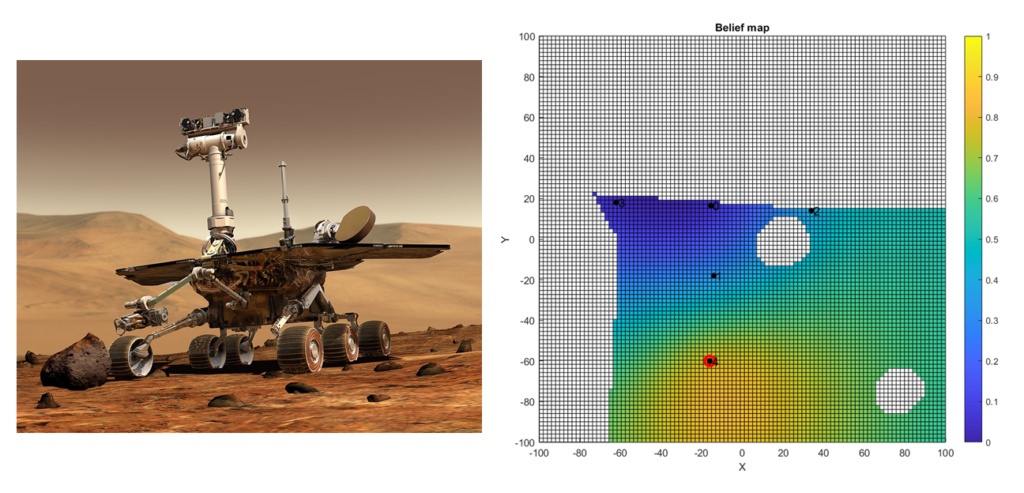
Robots can be a useful tool to aid in gathering information about a space, especially in remote or hazardous environments such as extra-terrestrial surfaces or disaster sites. The goal is to reduce uncertainty about a quantity of interest while simultaneously finding the locations of greatest abundance (adaptive sampling). However, quantities of interest are often not directly measurable or have a high cost associated with their measurement, while other related quantities are more readily available (prospecting). Algorithms are needed that can 1. infer information about the quantities of interest and 2. optimize where to sample next based on observations so far and mission constraints. I will explain specifically about the combination of a couple such algorithms for a lunar application.
Bios:
Yurui Zhang received his Bachelor’s degree in Mechanics Engineering at the University of Sydney in 2019. He started PhD study in 2021 at the Australian Centre for Field Robotics under the supervision of Prof Ian Manchester. He works on the motion planning algorithm for bipedal robots. His research interests include optimal control, nonlinear system, and reinforcement learning.
Nicholas Harrison is a first-year Ph.D. student at the University of Sydney, researching with SIRIS/ACFR under the supervision of Salah Sukkarieh. Prior to commencing at USyd, Nicholas received his BS in Physics at Brigham Young University and completed a post-graduate program (MS) in Robotics at the University of Utah. His research interests include information theory, optimization, and knowledge representation.