When: Thursday 16th of June, 12pm AEDT
Where: This seminar will be presented online via Zoom, RSVP here.
Speaker: A/Prof. Hanna Kurniawati (ANU)
Title: Robust Decision-Making in Non-Deterministic and Partially Observable World
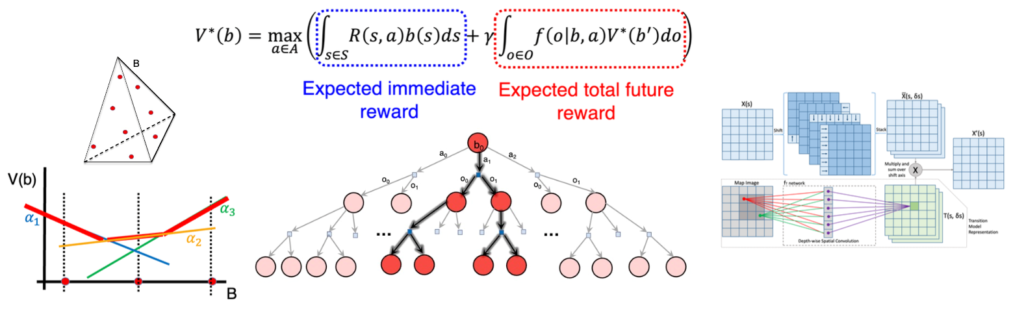
Abstract: Despite the rise of self-driving cars and drones, an autonomous system that can operate reliably outside a carefully structured factory floor is rare. The main reason is uncertainty. A robot must decide what it should do now to accomplish its tasks, despite not knowing the exact effect of its actions, errors in sensors and sensing, and the lack of information and understanding about itself and its environment. However, the technology for making good decisions in the presence of uncertainty is still lacking. In this talk, I will present some of our recent work in developing such technology, specifically in our work on enabling the Partially Observable Markov Decision Processes —the general and principled framework for decision-making under uncertainty— to become practical.
Bio: Hanna Kurniawati is an Associate Professor with ANU and CS Futures fellowships at the ANU School of Computing. Hanna’s research interests include planning under uncertainty, robotics, robot motion planning, integrated planning and learning, and computational geometry applications. Together with students and collaborators, her work has received multiple awards, including an ICAPS’15 best paper award, a finalist for the best paper award at ICRA’15, and the Robotics: Science and Systems’21 Test of Time Award. Hanna is also a keynote speaker for IROS’18, Senior Editor for IEEE RA-L and Program Co-Chair for ICRA 2022.